


ハンググライダー飛行の運動モデル確立を目指して
ハンググライダーとは
ハンググライダーは、人が乗って飛行するための軽量な飛行機です。主に化学繊維の布と金属フレームで構成されており、翼の形状を保つための骨組みが入っています。操縦者はキールから吊り下げられたハーネスに身を包み、ベースバーを前後左右に押し引きすることによって方向を調整します。
※操縦者は足を出した状態でハーネスを半分まで装着し、自分で助走をして飛び立ちます。その後、飛行しながら足をハーネス内にしまい、最終ロックをします。

飛行計測システムの課題
近年、ハンググライダーの体験シミュレータが開発されています。
このシミュレータは天候に左右されず、都市部でハンググライダーの体験会などが開催できるため、普及活動に活用されています。
しかし、現状では機体の運動モデルにグライダーのものが使用されており、ハンググライダー固有の運動モデルが開発されていないという問題があります。
操縦を再現可能なシミュレータを開発するためには、ハンググライダーの運動モデルが必要です。
この運動モデルが確立されれば、より現実的な飛行を体験できるだけでなく、効率的な飛行訓練も可能となります。
飛行の仕組み
ハンググライダーはパイロットがベースバーを操作して操縦されます。すなわち,パイロットがベースバーに力を加え,重心を移動させながら昇降や旋回を行います。その際に腕の力でベースバーを支えその反力で機体の姿勢が変化して機動するのです。
具体的には,
加減速:パイロットが体を前に押し出すと機首が下がり、速度が増します。逆に引くと機首が上がり、速度が減少します。
左右への旋回:ベースバーを左右に押すことで翼の傾きを変え、旋回を行います。
このように、力のかけ方によって機体の姿勢が制御されることがわかります。
今回は、ベースバーの左右それぞれに3軸力覚センサ(TL3B05)を収納したグリップを取り付け、飛行中の加減速、左右への旋回時にパイロットがどのような力を加えているのか、3分力(圧縮・引張力、せん断力)を計測します。
※力覚データの他に、GPS受信機付きIMUセンサで加速度、角速度、姿勢角データとともに位置情報も同時に取得されています。


ハンググライダー専用運動モデル
本飛行計測システムは飛行中のハンググライダーにおけるパイロットの操縦入力と機体運動を同時に計測できます。
得られたデータと運動モデルから空力パラメーター等の推定が可能となり、実機の飛行を再現するシミュレータの開発が期待されます。
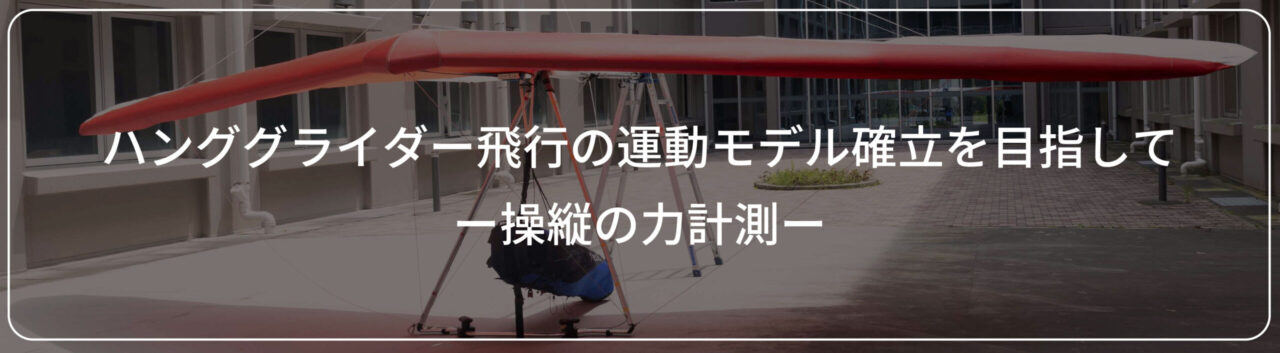
ひずみアンプについて
今回は12chひずみアンプGDA-12の6chを使って、計測用ノートPCもハンググライダーに搭載して計測をしています。
センサ×GDA-12×ノートPCは全て有線で繋げられており、機体の骨組みに線を這わせて配線しています。
GDA-12は機体内側の中央に固定し、ノートPCは機体と翼の間に固定しています。
翼は直射日光を受けるため高温状態になることや、PC操作でアンプを制御しているため、飛行直前に記録をスタートした後、ノートPCを固定する必要があります。

これに対し、新製品のPDL-06-SAは完全PCレスでの運用が可能なため、センサ×PDL-06-SAで完結し、PDL-06-SA自体も小型なため、機体に影響なくセンサ付近に配置させることも可能です。
これにより大幅に手間を削減し、効率的な運用を実現できます。
