


氷上の地面反力計測 -フィギュアスケートジャンプの解明-
氷上での地面反力計測の難しさ
昨今、スポーツを運動学的手法から分析して、運動パフォーマンスを向上させるコーチングが多くなってきています。一般的に、動作解析にはモーションキャプチャが使われ、力発揮(地面反力)にはフォースプレートを用いて測定されます。フォースプレートは面で力を受け、その際の力の出力をセンシングするため、フォースプレート自体の固定が非常に重要なポイントとなります。そのため、地面にピットを掘り、フォースプレートをしっかりと固定することが基本となります。しかしスケートのような氷上での競技など、ウィンタースポーツでは、地面ピットを掘り、フォースプレートを固定することが困難なため、計測が現実的ではありませんでした。これらの課題をクリアするため、ひずみゲージを直接スケート刃に貼り付けることや、感圧インソールで1軸の荷重分布をみることなども行われてきましたが、6分力(3軸フォース、3軸モーメント)を同時に計測することは依然として課題でした。
M3Dを活用したフィギュアスケートジャンプ計測
今回長谷研究室では、小型薄型ウェアラブルフォースプレートM3Dを使った計測システムを構築し、これらの課題を打破し、氷上での6分力計測を達成しました。氷上で6分力計測したのは世界初なのではないでしょうか!
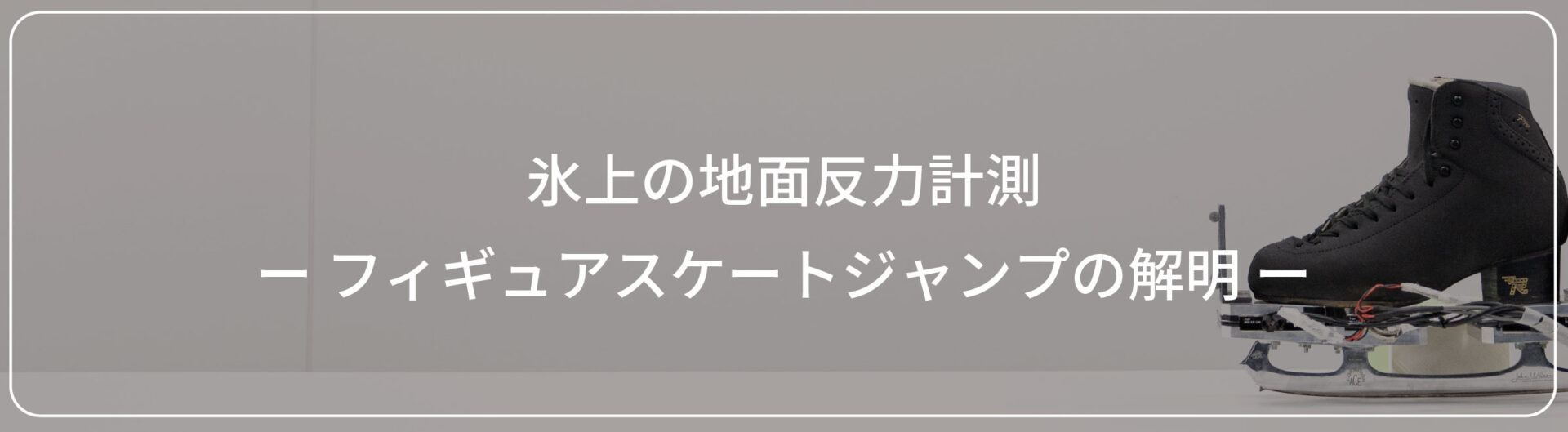
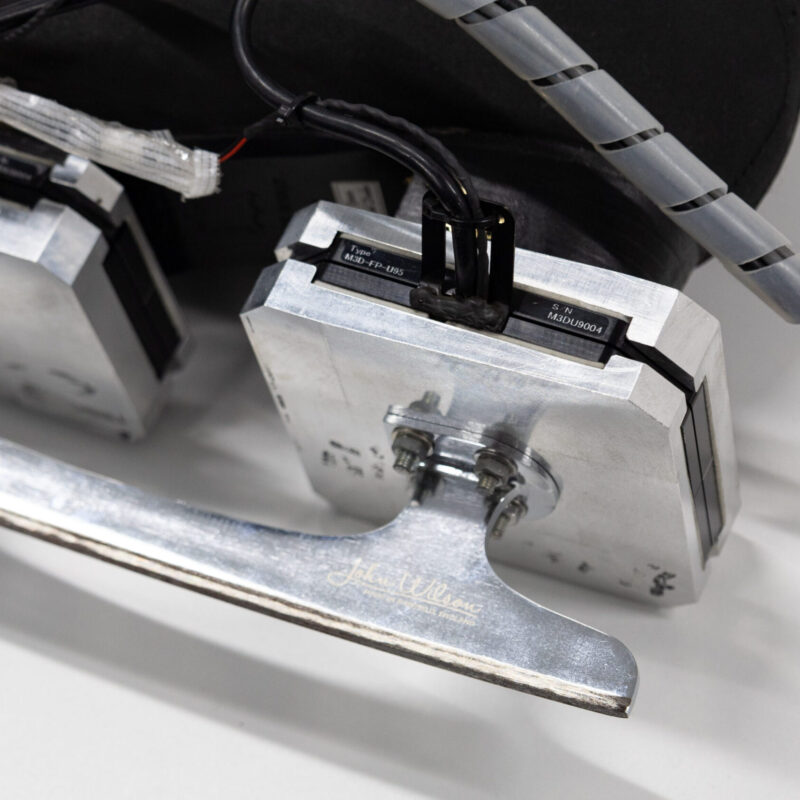
ブレードとブーツの間に3枚のM3Dを設置することで、荷重の分散、設置面積を稼ぎ、また3方向の力と各軸周りのモーメントが発生する複雑な動作を伴うフィギュアスケートのジャンプ動作に迫ることが出来ます。


リファレンスとして、床に設置されているフォースプレート(TF-4060)上で本システムを装着して6種類の動作の計測(各10回)も行いました。
光学式モーションキャプチャを使用して、M3Dの姿勢、位置を計測し、床固定のフォースプレート(TF-4060)と同じ座標系になるように軸方向を補正しています。

6種類の動作
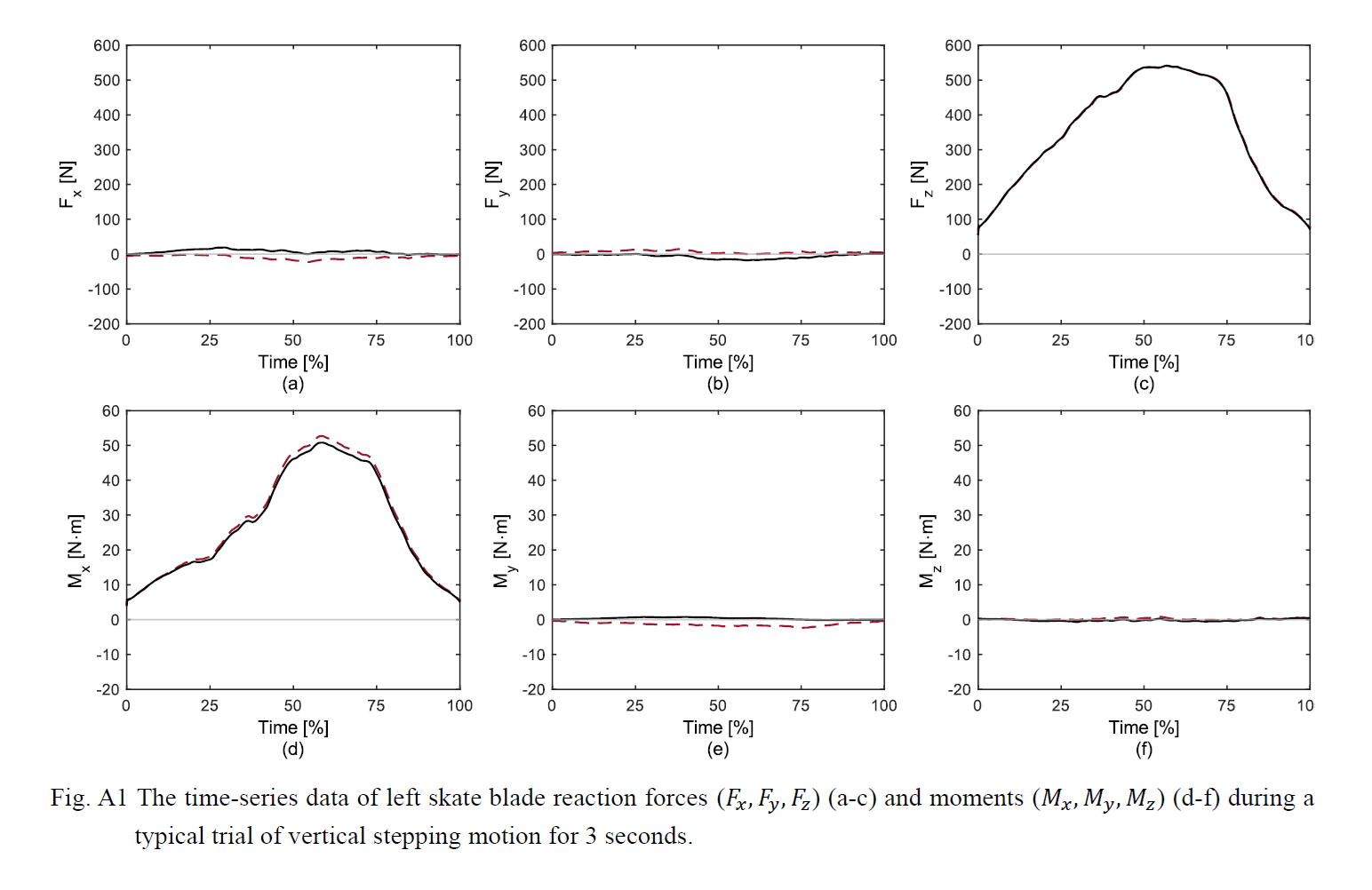
・上下踏み出し動作(踏み出しから初期姿勢に戻るまで1秒間)※治具や固定方法の影響確認
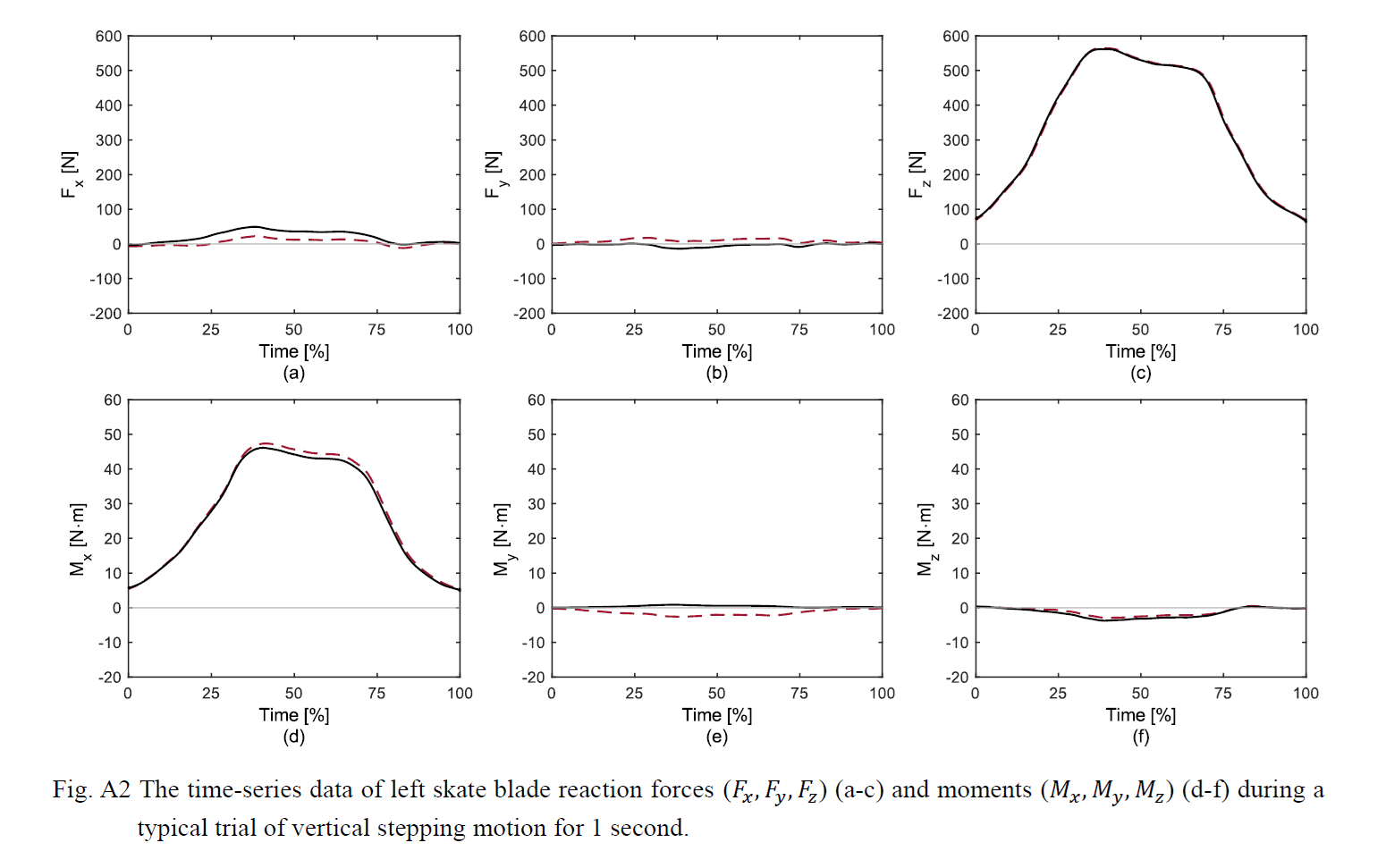
・上下踏み出し動作(踏み出しから初期姿勢に戻るまで3秒間)※治具や固定方法の影響確認
・両足でのその場垂直飛び動作 ※瞬間の動的負荷を検証
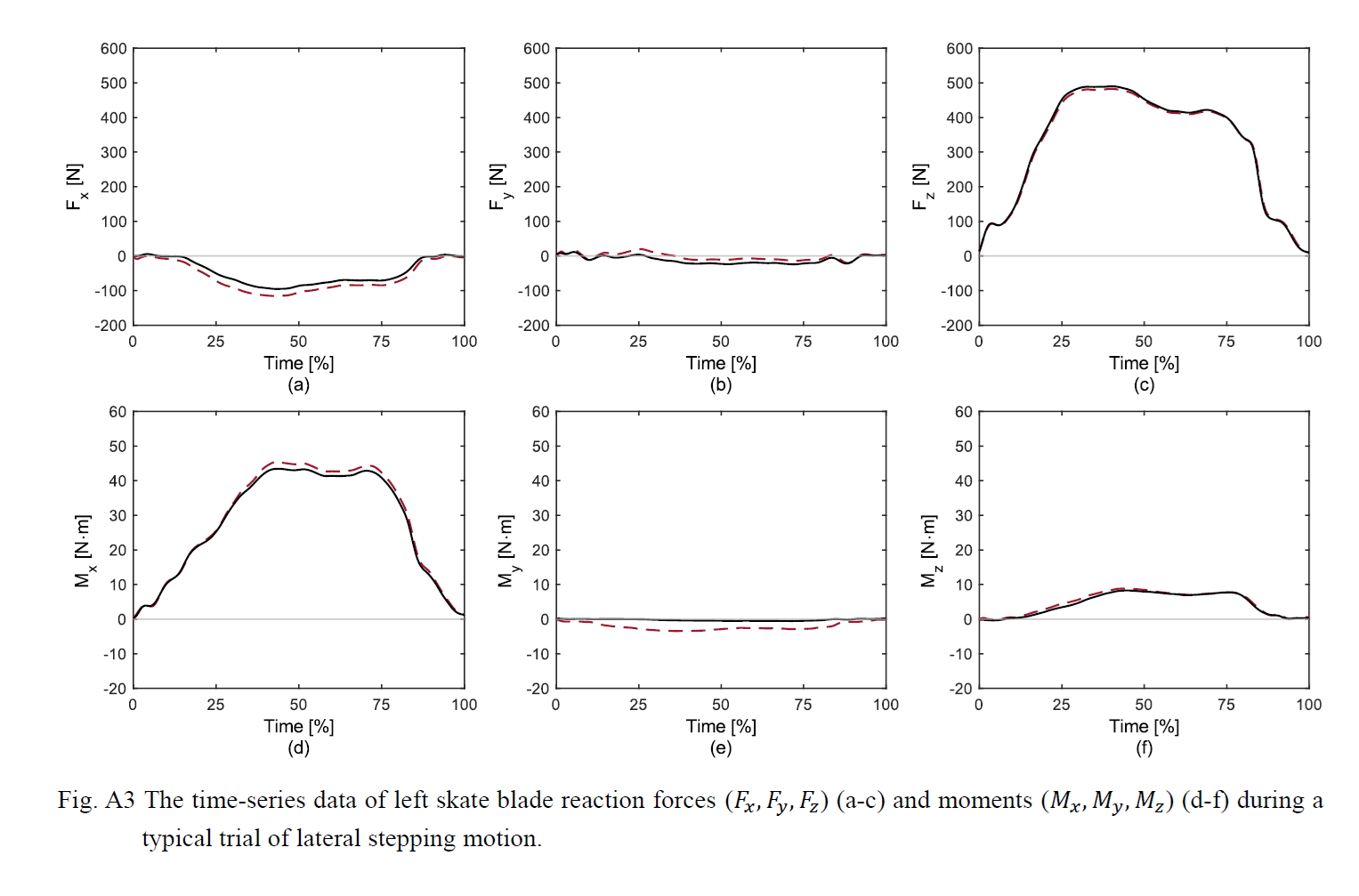
・横方向のステップ動作 ※内側―外側の動的荷重を検証
・長手方向のへの踏み込み動作 ※ブレード長手方向の動的負荷を検証
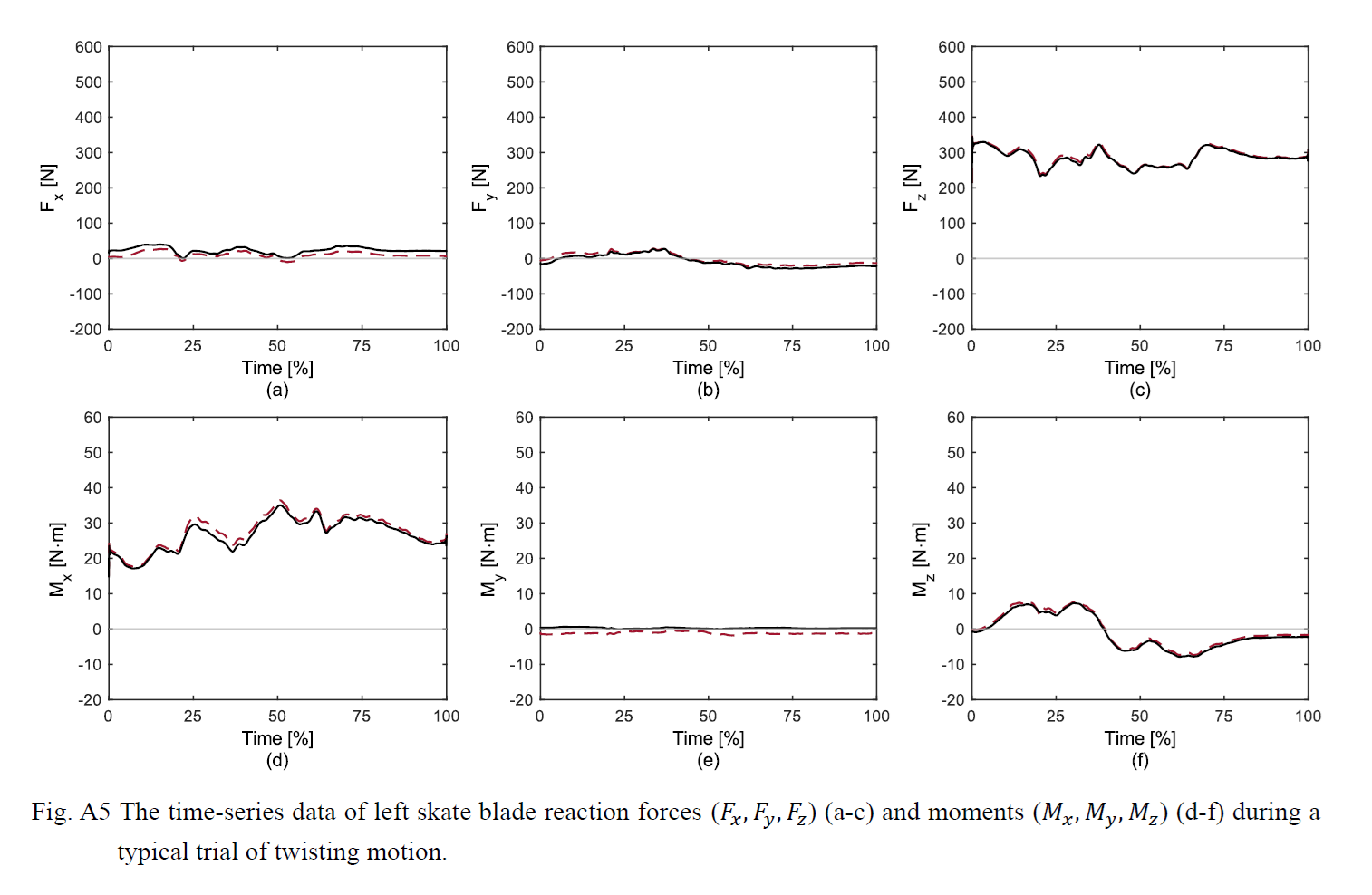
・ひねり動作 ※垂直軸周りを検証
※左ブレードの各反力、モーメント成分の比較
※二乗平均平方根誤差(RSME)と相対二乗平均平方根誤差(rRSME)のパラメータを比較。
※実線 (黒):M3D 破線 (赤):地面固定フォースプレート

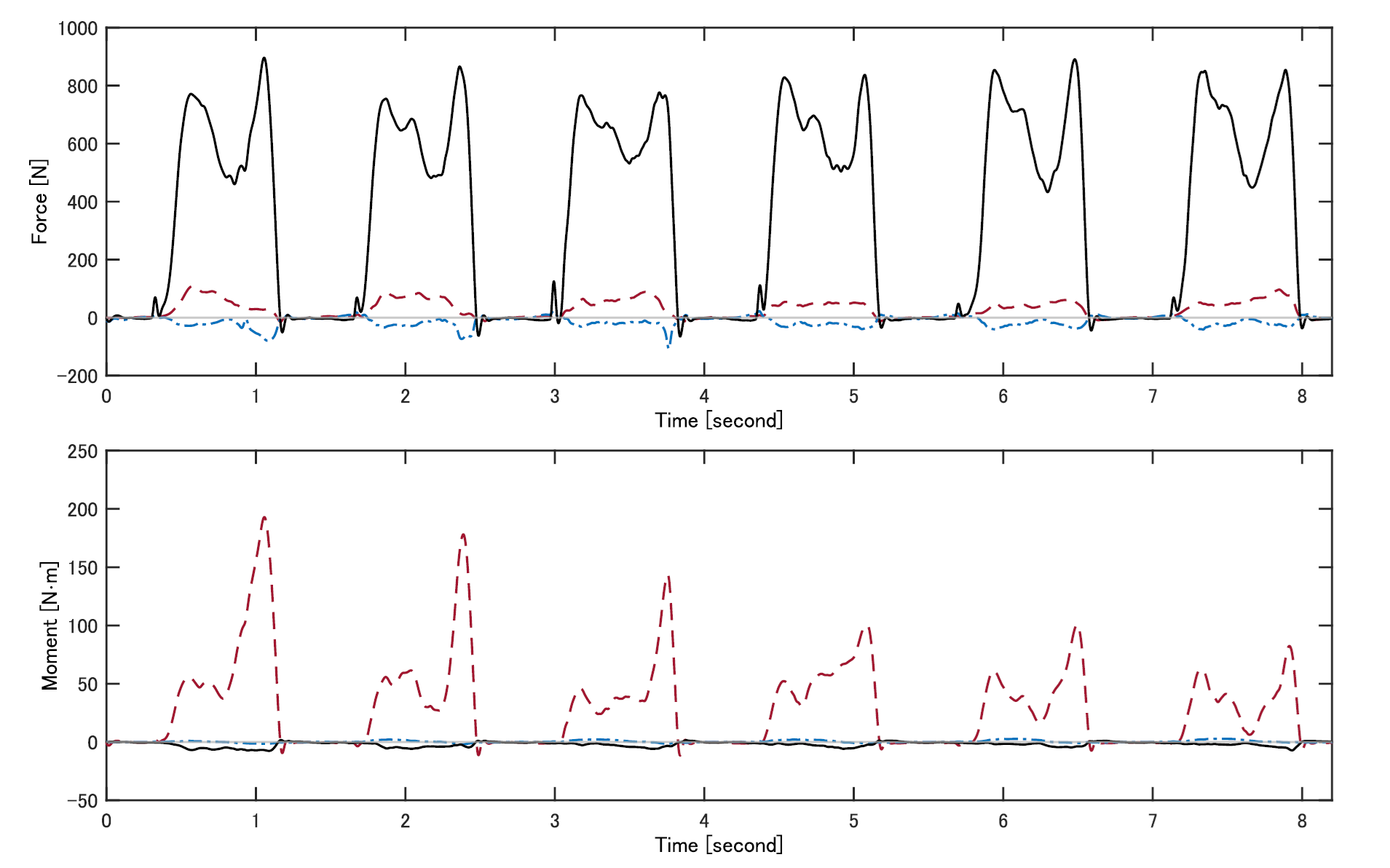
今回は前進スケーティング動作を計測し、静止した立位から加速を開始。その後、片足を6ストローク分計測。
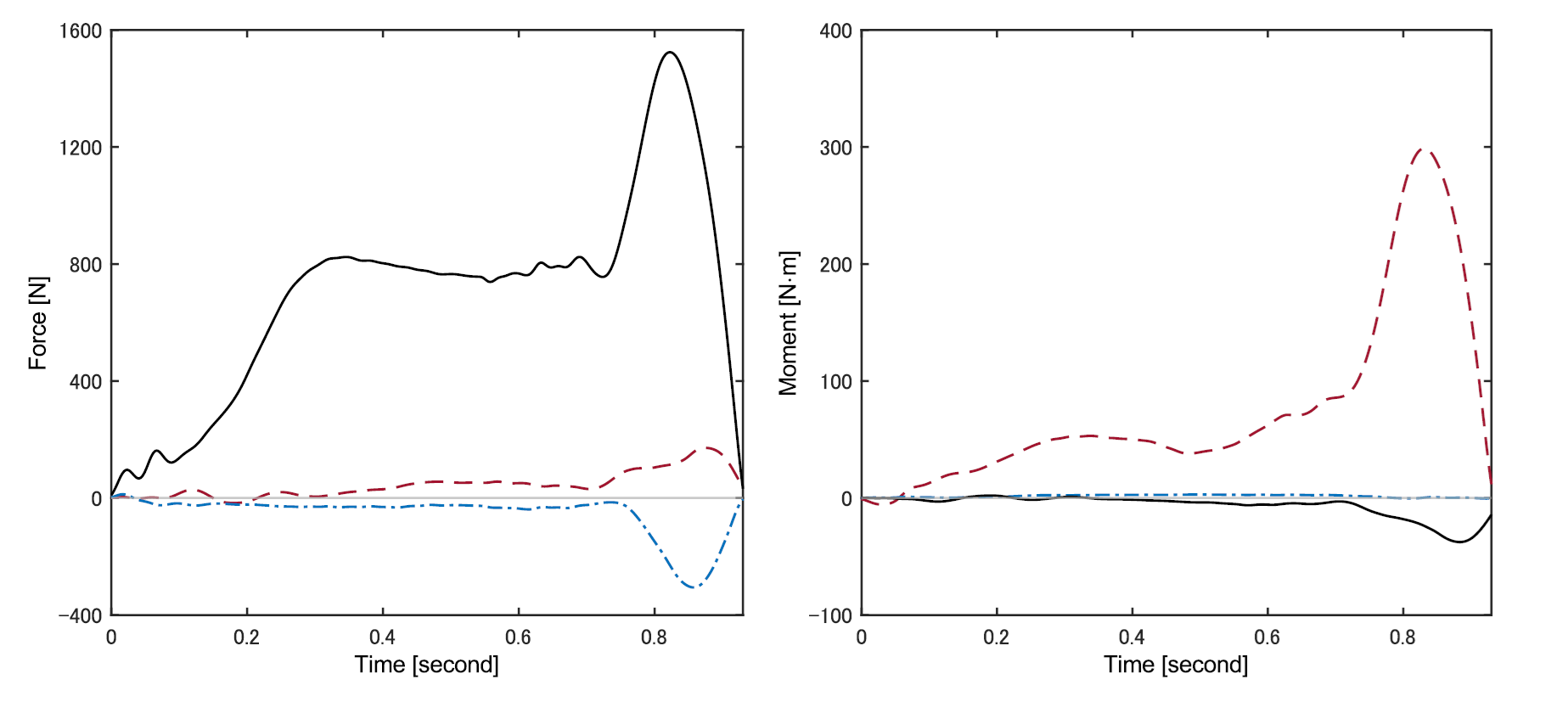
また半回転ジャンプ(ワルツジャンプ)動作では、静止した立位姿勢からスタートし、助走後に左足で離陸。
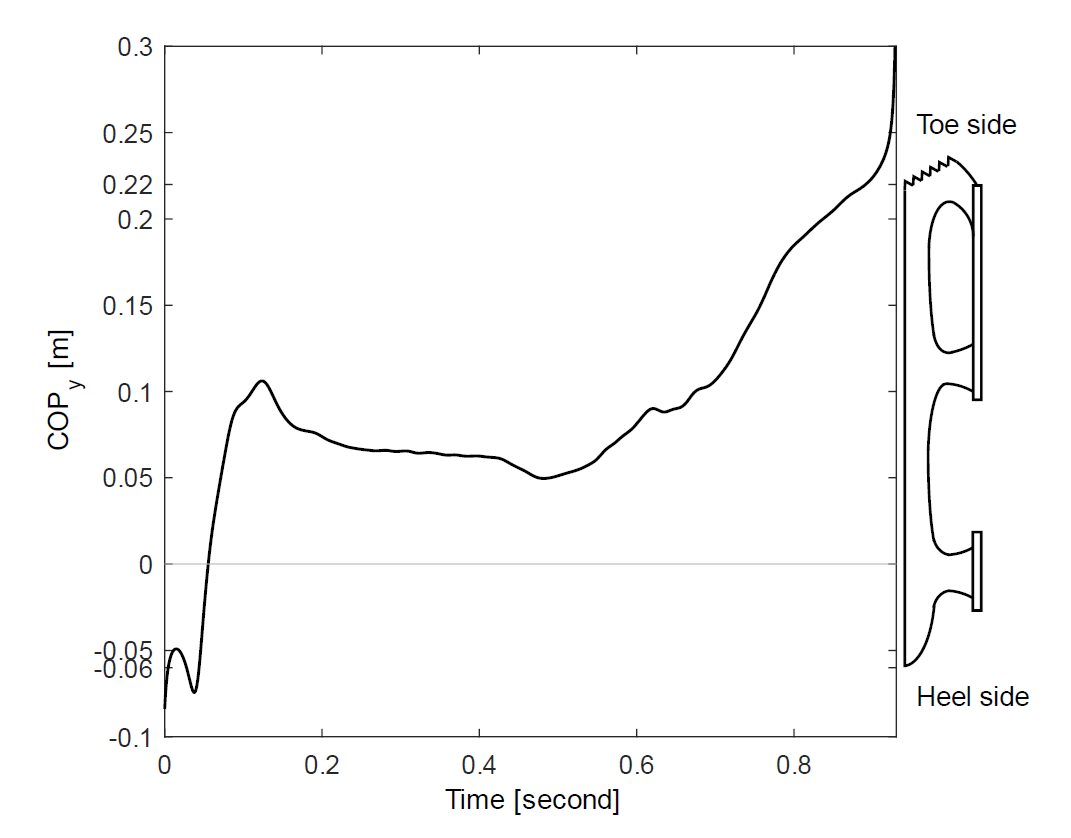
それぞれ反力を、ジャンプでは3枚のM3Dデータを合成したCOPまで計測を行った。
※反力…破線 (赤):Fx 破線 (青):Fy 実線 (黒):Fz
※モーメント…破線 (赤):Mx 破線 (青):My 実線 (黒):Mz


今後の計測への期待
検証では、光学式モーションキャプチャで得られたセンサ(M3D)姿勢、位置をグローバル座標系に変換しましたが、氷上で光学式モーションキャプチャを行うことは大変な大掛かりな作業になります。センサ姿勢、位置、また選手の動きをIMUセンサからモーションキャプチャすることで、スケーターを氷上に対する固定座標系として捉えることが出来、新たな力学的観点からパフォーマンス向上や傷害リスク分析への応用の期待が高まります。
▶学術論文引用
Yuse HARA, Takayoshi TAKAHASHI, Naoto HARAGUCHI, Tatsuki KOSHIO, Yohsuke TAKEUCHI, Kazunori HASE, Wearable system for measuring three-dimensional reaction forces and moments using six-axis force sensors during skating, Journal of Biomechanical Science and Engineering, 2024, Volume 19, Issue 4, Pages 24-00093
DOI: 10.1299/jbse.24-00093
M3Dについて
超小型薄型ウェアラブルフォースプレートで、有線タイプ、有線タイプ(アナログ出力対応)、無線タイプと様々な種類があります。この小型フォースプレートは世界でもかなり稀なサイズで、これまで困難だった計測を打破できる一つのカギとなる製品です。
やはりウェアラブルのこともあって、運動計測とは相性がよく、これまで場所を気にしない歩行計測やロードバイクのペダル踏力、また9軸IMUセンサも内蔵していることもあって、ロボット分野ではヒューマノイドの足裏に配置させることや、産業用機械に組み込むことなど、多岐にわたって活躍しています。