ロボットハンド組み込み3軸力覚センサ
ーリアルタイム制御で商品陳列ー
ロボットハンド組み込み3軸力覚センサ リアルタイム制御で商品陳列
技術研究組合 産業用ロボット次世代基礎技術研究機構 ROBOCIP
(Robot Industrial Basic Technology Collaborative Innovation Partnership)
ROBOCIPの活動産業ロボットは、自動車産業をはじめ、電機・エレクトロニクス産業ですでに多く活用されており、近年では労働力不足の背景から更なる広がり、発展が見込まれています。
ROBOCIPでは、産業用ロボットの基礎技術研究分野において、ロボットメーカー各社が連携することで、単独で行うよりも研究規模・内容を拡大・深化し、SDGsに則った技術革新の基盤を強化することを目指しています。
自律的な動作をするロボットハンドを目指して今回、NEDOプロジェクトの「革新的ロボット研究開発基盤構築事業」にて進めている「ハンドリング・汎用動作計画技術」の自律型グリッパー先端部に、弊社の小型薄型3軸力覚センサを採用いただいています。
- 筑波大学相山研究室にて各種力学特性の自動計測手法を開発
- グリッパー製作担当は新エフエイコム(株)
- アンプは特注設計にてデジタル通信して力覚データのフィードバックを行っています。
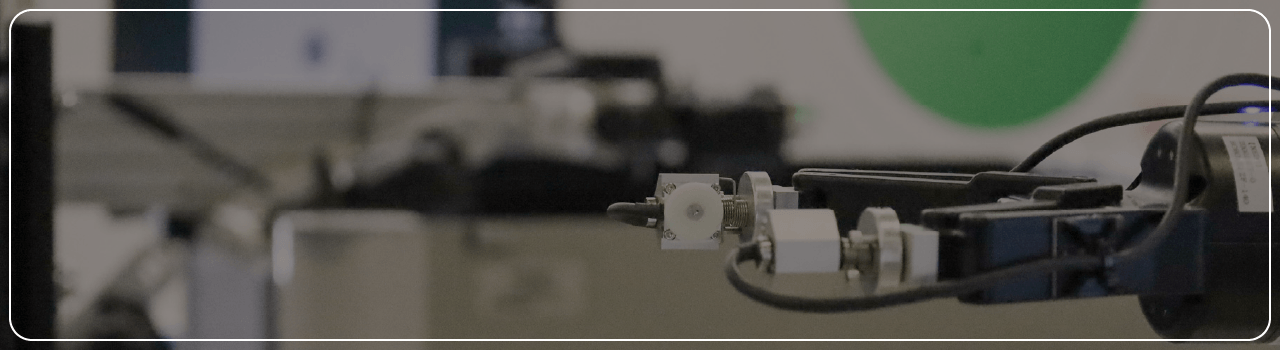
 グリッパー先端に3軸力覚センサを配置
グリッパー先端に3軸力覚センサを配置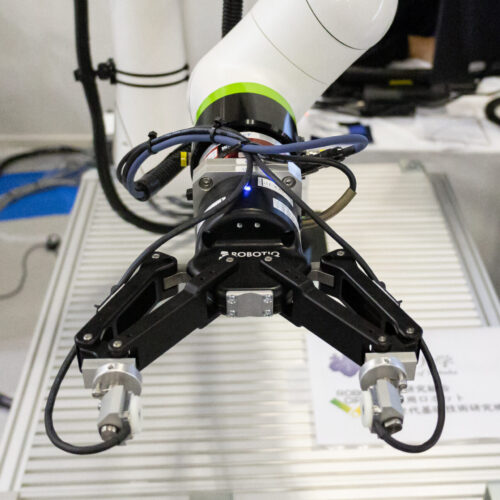 2本爪のグリッパー
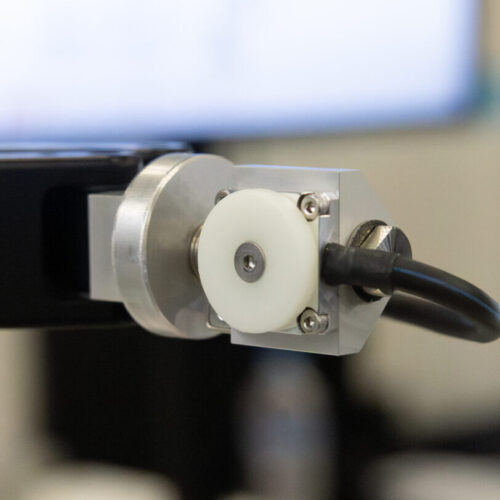
2本爪のグリッパー 小型・薄型3軸力覚センサUSL06シリーズ
小型・薄型3軸力覚センサUSL06シリーズ
自律的な動作を可能とするData-driven Roboticsの考え方により、ロボットシステムインテグレーション(SI)手法を効率化し、多様な環境・対象物に対する柔軟な対応ができる高度なロボット製作や、ロボット導入をより容易に、従来は適応できなかった分野にも導入を可能とすることを目指しています。
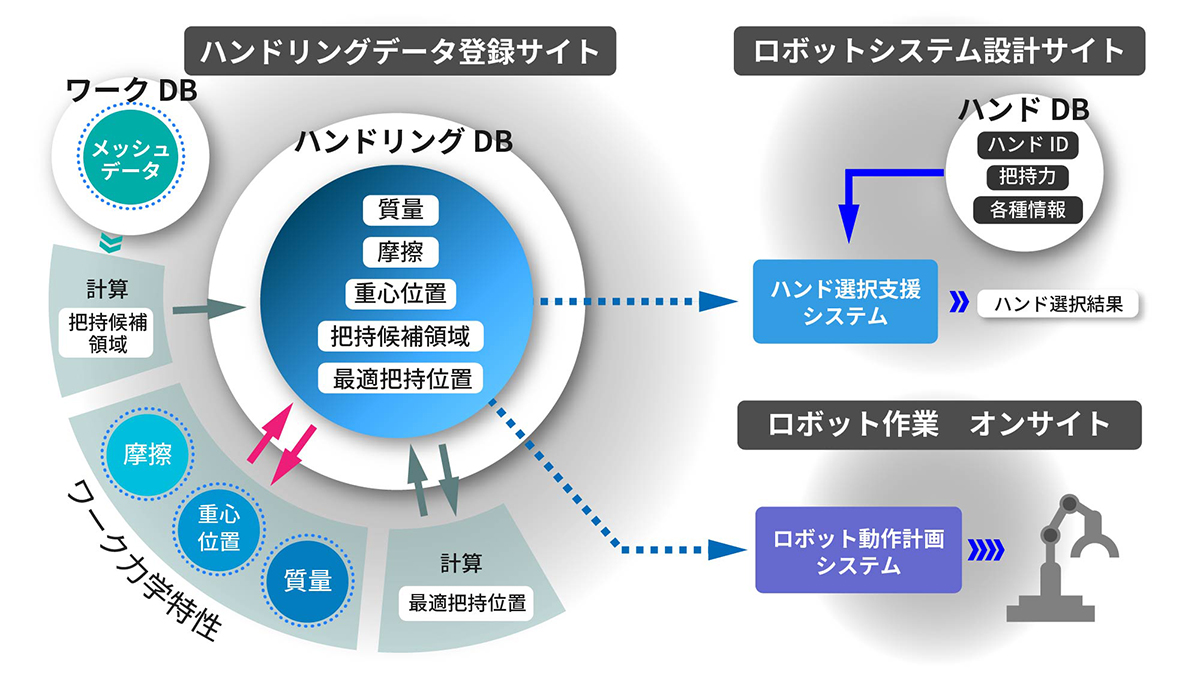
センシング技術
- 多点カメラから商品の形状データ(メッシュデータ)を取得→DBへ
- グリッパーに仕込まれた3軸力覚センサを一度対象物をなぞる様に滑らせたり、各種姿勢をとることで、対象物の力学特性(質量、摩擦、重心位置)を取得→DBへ
- これらの情報を基に最適な把持位置、把持力にて対象物を搬送
力覚データのポイントモノを掴む動作は把持力と深い関係がありますが、グリッパー側、対象物側それぞれのテクスチャ感は様々であり、対象物が自重や慣性力で滑り落ちるせん断方向の滑り力(摩擦力)も重要な要素となります。今回採用いただいている小型薄型3軸力覚センサUSL-06シリーズは、把持方向の1軸成分だけではなく、滑り落ちるせん断方向の荷重情報が計測でき、摩擦情報の取得が可能です。
- 技術研究組合 産業用ロボット次世代基礎技術研究機構(ROBOCIP):https://www.robocip.or.jp/