Robot Hand-Integrated 3-Axis Force Sensor
— Real-Time Control for Product Display —
Robot Hand-Integrated 3-Axis Force Sensor Real-Time Control for Automated Product Display
Industrial Technology Research Association
Robot Industrial Basic Technology
Collaborative Innovation Partnership (ROBOCIP)
ROBOCIP’s Activities
Industrial robots are already widely utilized in industries such as automotive, electrical, and electronics manufacturing. In recent years, further expansion and development are expected, driven by labor shortages.
ROBOCIP aims to strengthen the foundation of technological innovation aligned with the SDGs by promoting collaboration among robot manufacturers in the field of fundamental industrial robot technologies. Through cooperation, research scale and scope can be expanded and deepened beyond what individual companies could achieve independently.
Toward an Autonomous Robot Hand
As part of NEDO’s “Innovative Robot Research and Development Infrastructure Project,” our compact, thin-profile 3-axis force sensor has been adopted for the autonomous gripper tip used in the “Handling and General-Purpose Motion Planning Technology” initiative.
- Development of automated measurement methods for various mechanical properties at the Aiyama Laboratory, University of Tsukuba
- Gripper manufacturing handled by Shin FAcom Co., Ltd.
- A custom-designed amplifier enables digital communication and force data feedback
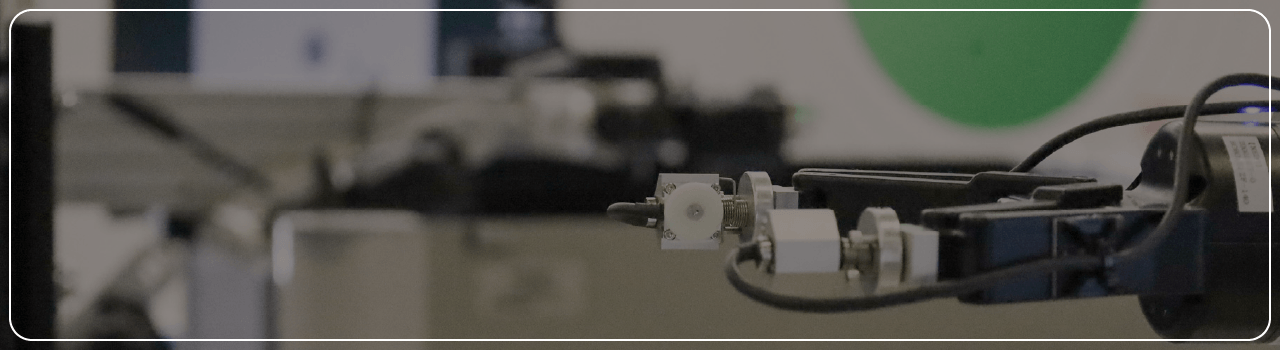
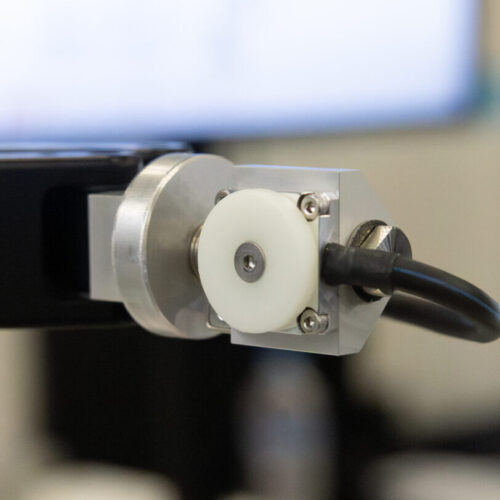 3-axis force sensor mounted at the gripper tip
3-axis force sensor mounted at the gripper tip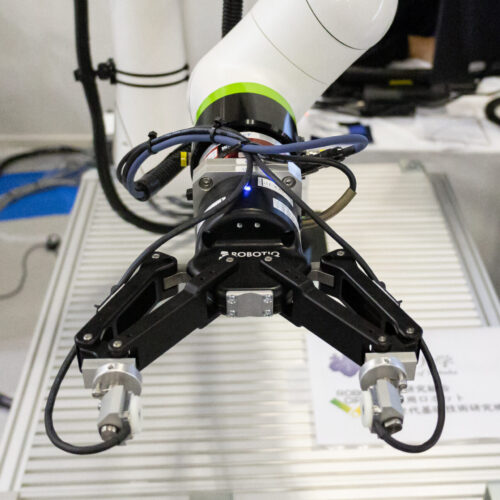 Two-finger gripper
Two-finger gripper Compact, thin-profile 3-axis force sensor (USL06 Series)
Compact, thin-profile 3-axis force sensor (USL06 Series)
Based on the Data-driven Robotics concept that enables autonomous operation, the project aims to streamline robot system integration (SI) methods. This approach supports advanced robot development capable of flexibly adapting to diverse environments and objects, making robot implementation easier and expanding adoption into fields previously considered unsuitable.
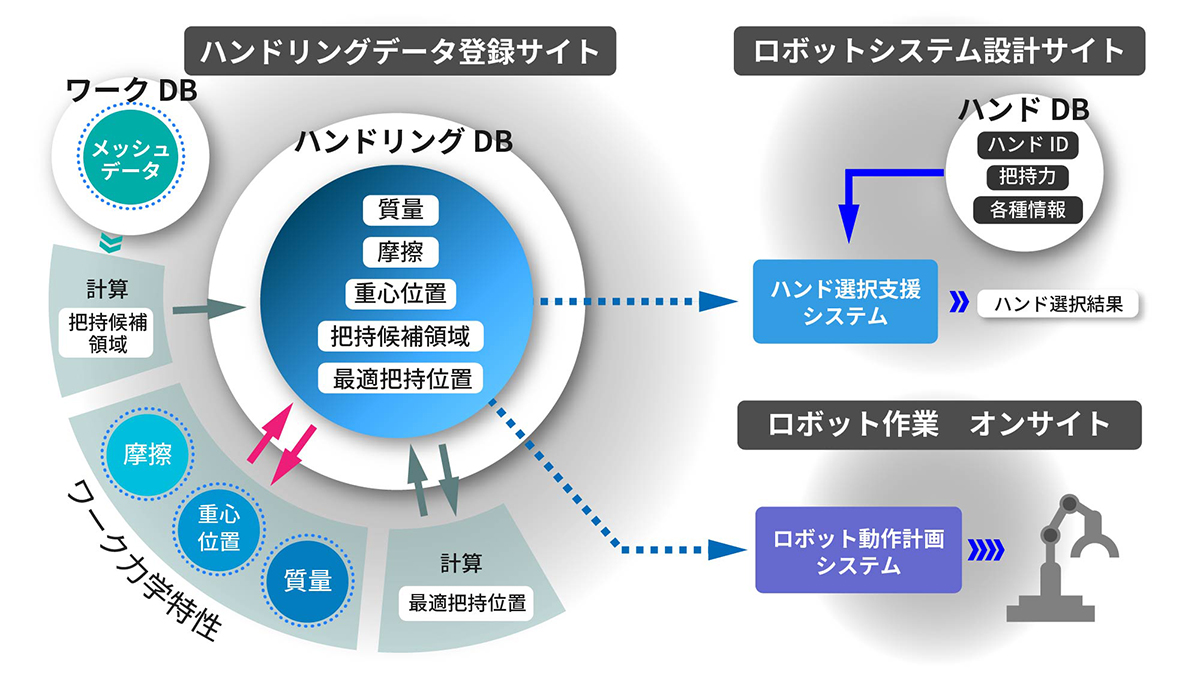
Sensing Technology
- Acquisition of product shape data (mesh data) from multiple cameras → stored in a database
- The 3-axis force sensor embedded in the gripper traces the object and assumes various orientations to obtain mechanical properties (mass, friction, center of gravity) → stored in a database
- Based on this information, the object is transported using the optimal gripping position and gripping force
Key Points of Force Data
Grasping motion is closely related to gripping force. However, the texture of both the gripper surface and the object varies, and shear force (frictional force) in the direction of slipping—caused by the object’s weight and inertia—is also a critical factor.
The compact, thin-profile 3-axis force sensor (USL-06 Series) adopted in this project measures not only the axial component in the gripping direction but also load information in the shear direction where slipping occurs, enabling acquisition of friction data.
- Robot Industrial Basic Technology Collaborative Innovation Partnership (ROBOCIP): https://www.robocip.or.jp/