


東京大学 野崎大地 教授との共同研究のご紹介 vol2
技術情報
東京大学 野崎教授のご研究室に新型トレッドミルシステムを新規に導入しました。
エルゴメーターやフォースプレートシステムも整備されました。
運動計測を総合的にできるラボとなっています。

新型トレッドミルを用いた走動作パターンの評価
一定のベルト移動速度上で行う通常のトレッドミル歩行・走行では、 実際の歩行・走行における 随意的な速度調節や、走行動作に加速・減速を実装することは不可能です。
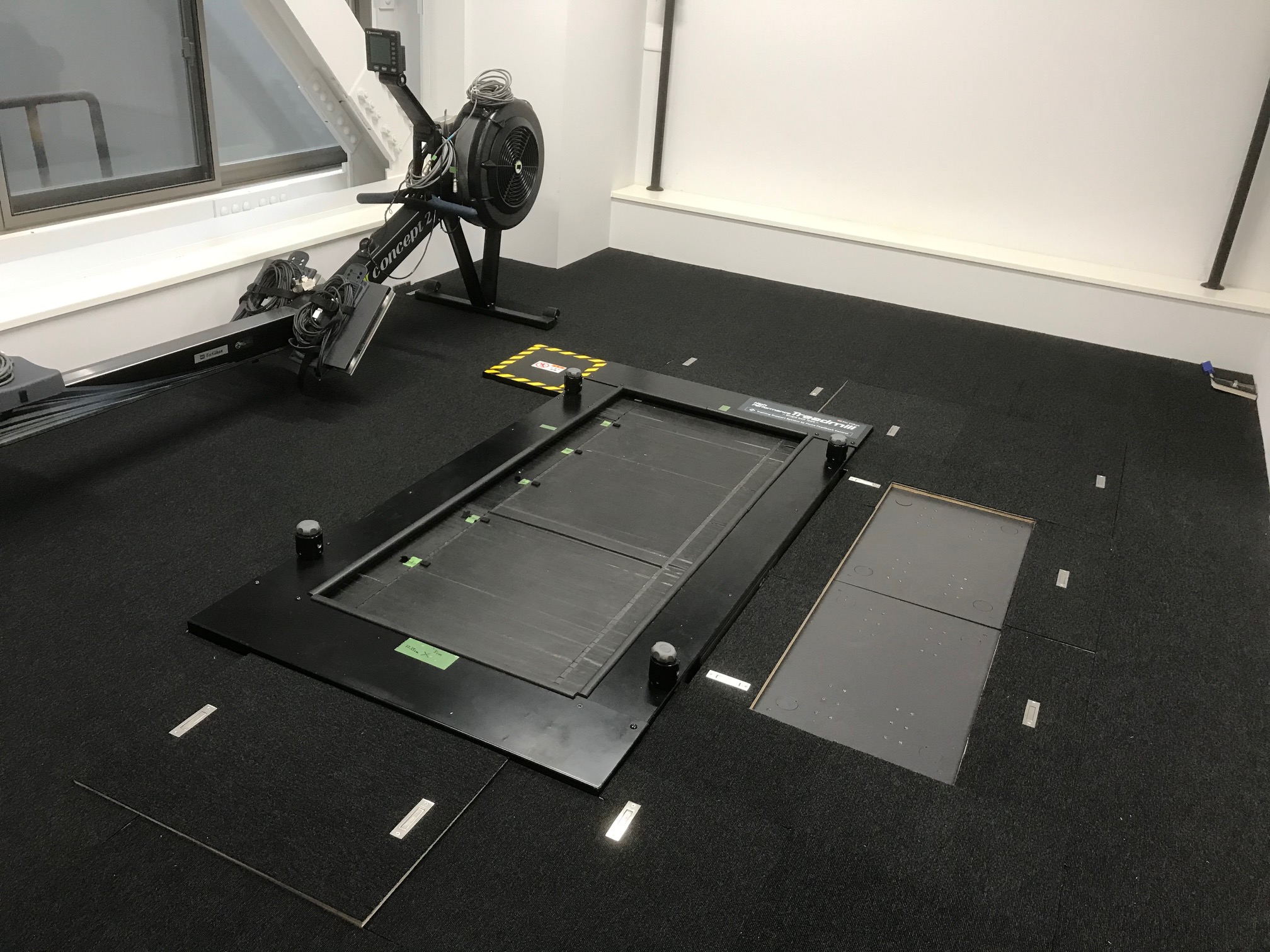
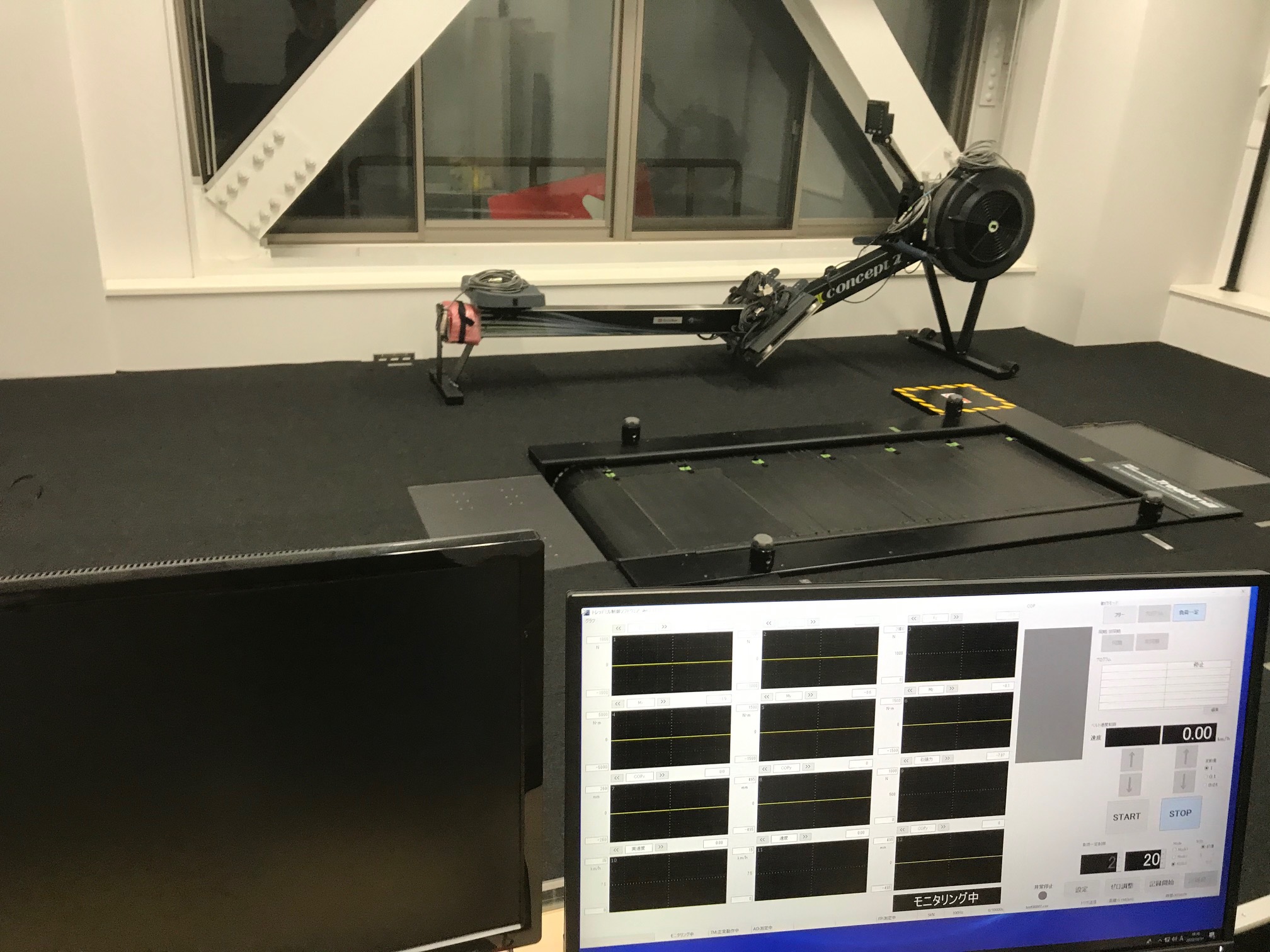
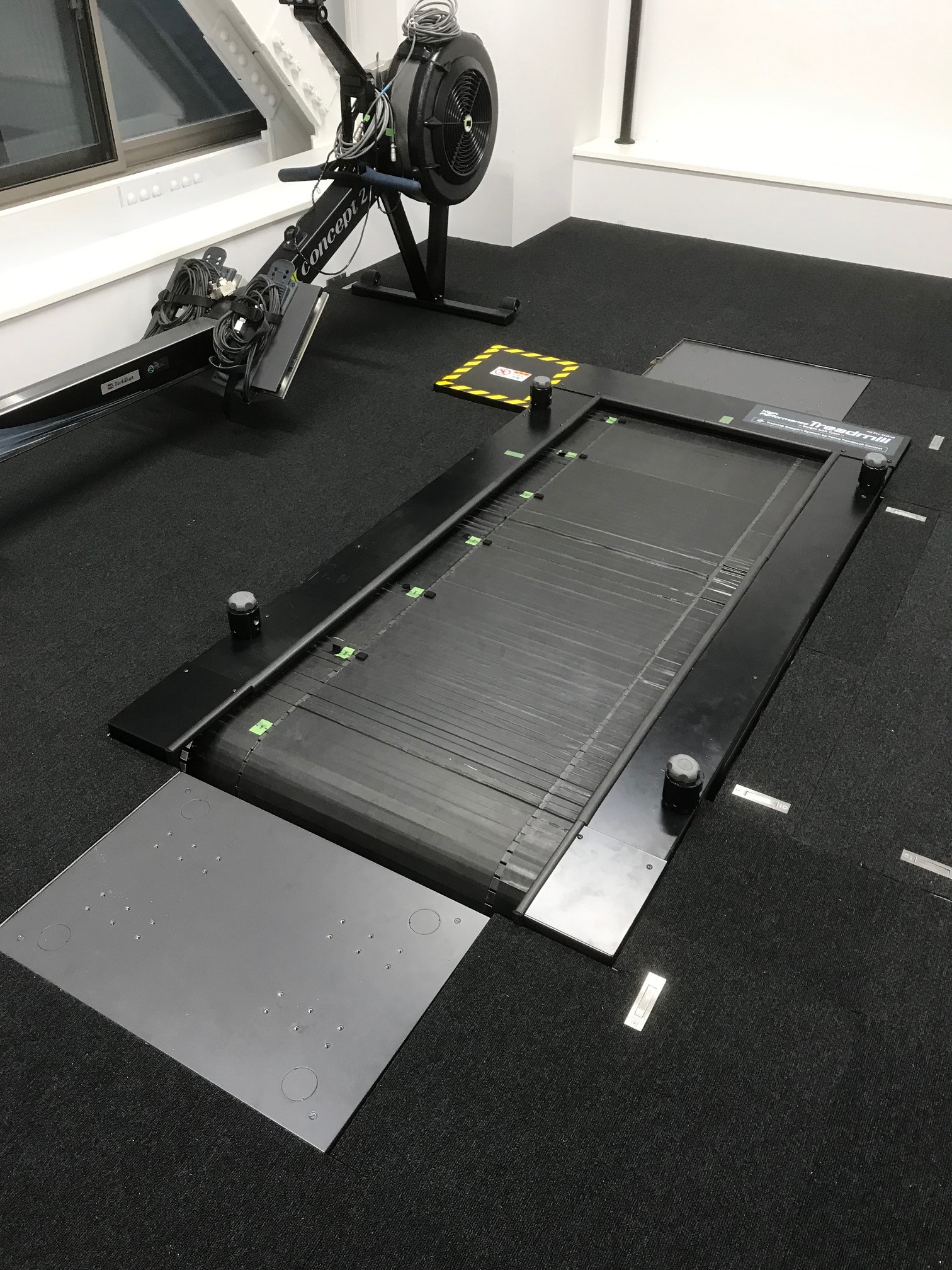
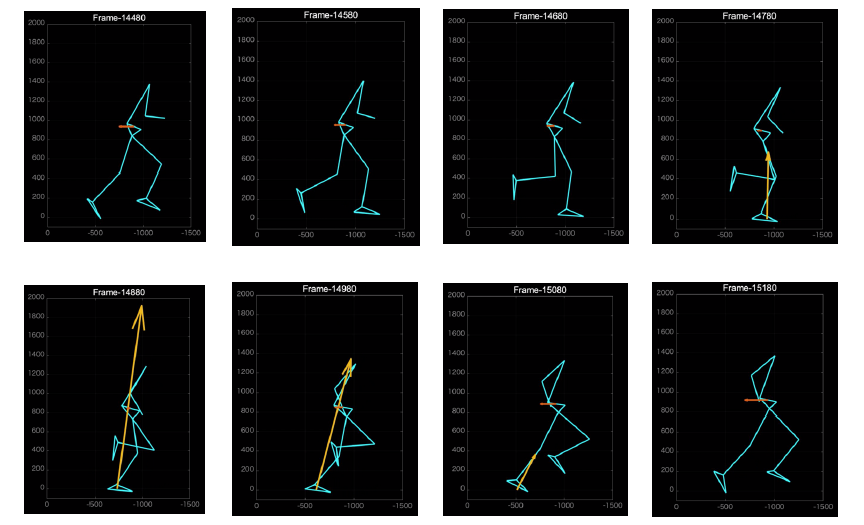
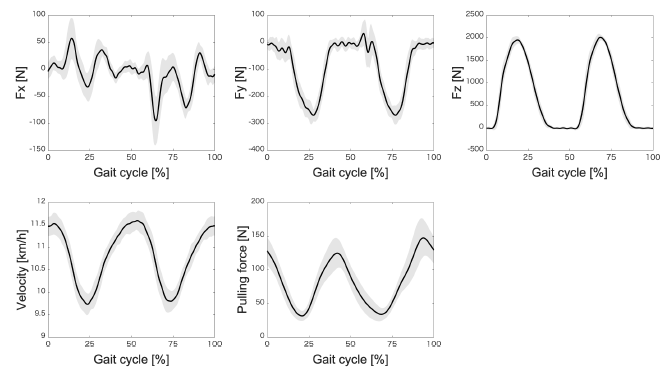
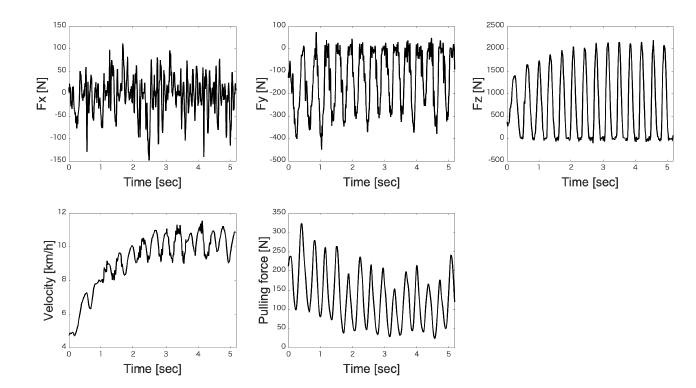
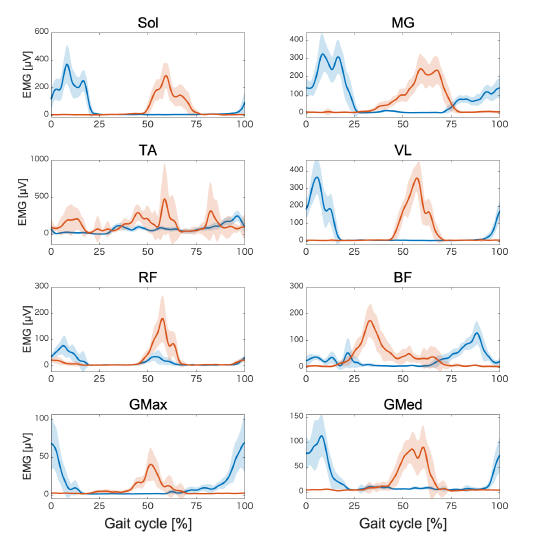
テック技販が新たに開発した ハイパフォーマンストレッドミルは、走行時の前後方向の床反力に依存して ベルト移動速度を操作する機構を取り入れることにより、より実際の 歩行・走行に近い動作を実現できるようになっています。(新機能:負荷制御機構搭載) 新型トレッドミル上で実施した動作および筋活動計測。
トレッドミルに取り付けられたフォースプレートにより、 前後方向の力を計測し、その力の情報をもとにベルト移動速度が決定する。 身体が前方に移動しないように、腰部を後ろから牽引している。 (牽引力も測定)
東京大学 野崎教授のご研究室(UTSSI Rowing Science Laboratory)内観