Ground Reaction Force Measurement on Ice
– Elucidating Figure Skating Jumps –
Ground Reaction Force Measurement on Ice – Elucidating Figure Skating Jumps –
Tokyo Metropolitan University, Hase Laboratory (Prof. Hase, Prof. Takahashi, Mr. Hara, Mr. Koshio, Mr. Haraguchi)
Challenges of measuring ground reaction forces on iceIn recent years, coaching methods that analyze sports using kinematic approaches to improve athletic performance have become more common. Generally, motion capture is used for motion analysis, while force plates are used to measure force exertion (ground reaction force). Since force plates receive force across a surface and sense the output of that force, securely fixing the force plate itself is extremely important. Therefore, it is standard practice to dig a pit in the ground and firmly install the force plate. However, in winter sports such as skating on ice, it is difficult to dig pits and fix force plates, making measurement impractical. To address these challenges, methods such as attaching strain gauges directly to skate blades and using pressure-sensitive insoles to observe one-axis load distribution have been attempted. However, simultaneous measurement of six components (three-axis force and three-axis moment) has remained a challenge.
Figure skating jump measurement using M3DIn this study, the Hase Laboratory developed a measurement system using the compact, thin, wearable force plate M3D, overcoming these challenges and achieving six-component force measurement on ice. This may be the first time in the world that six-component force measurement has been achieved on ice!
By installing three M3D units between the blade and the boot, load distribution is improved and the contact area is increased. This enables detailed analysis of figure skating jump motions, which involve complex movements with forces in three directions and moments around each axis.
 M3D units arranged on the same surface
M3D units arranged on the same surface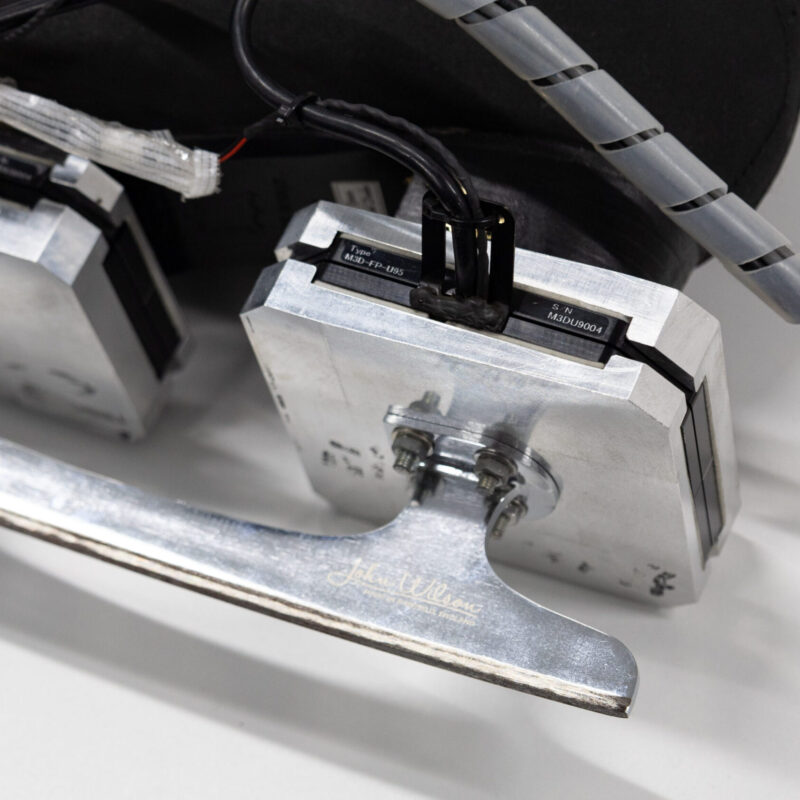 Custom mounting jig fabricated
Custom mounting jig fabricated Dummy inserted in the right foot to match height and weight
Dummy inserted in the right foot to match height and weight
As a reference, measurements of six types of movements (10 trials each) were also conducted while wearing this system on a floor-mounted force plate (TF-4060).
Using an optical motion capture system, the posture and position of the M3D units were measured, and the axis directions were corrected to match the coordinate system of the floor-fixed force plate (TF-4060).
 Measuring 6DOF of M3D using markers (front and rear placement)
Measuring 6DOF of M3D using markers (front and rear placement)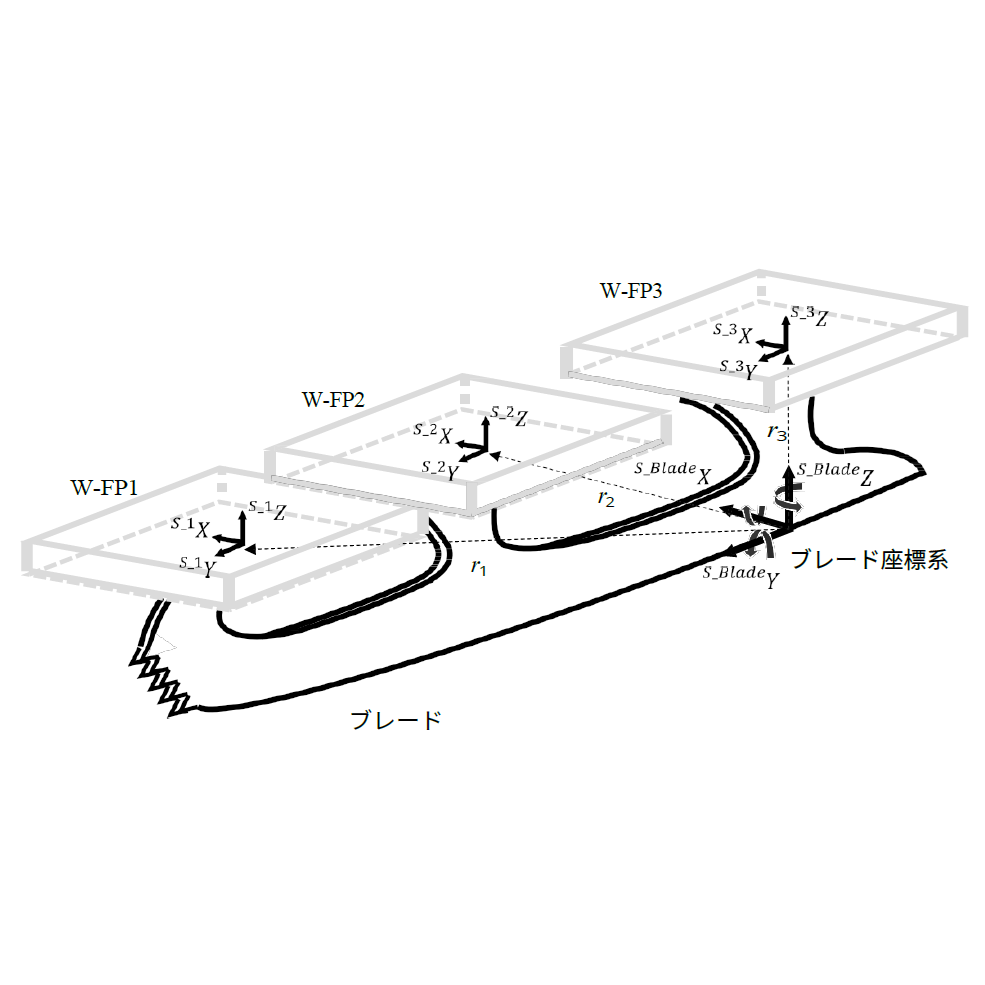 Force coordinate system (global: floor-fixed FP, each M3D)
Force coordinate system (global: floor-fixed FP, each M3D)
- Six types of movements
-
- Vertical stepping motion (1 second from push-off to return to initial posture) *To verify the effect of fixtures and mounting methods
- Vertical stepping motion (3 seconds from push-off to return to initial posture) *To verify the effect of fixtures and mounting methods
- Vertical jump in place with both feet *To examine instantaneous dynamic load
- Lateral stepping motion *To examine medial-lateral dynamic load
- Longitudinal stepping motion *To examine dynamic load along the blade length
- Twisting motion *To examine rotation around the vertical axis
- Comparison of each reaction force and moment component of the left blade
- Comparison of parameters: root mean square error (RMSE) and relative RMSE (rRMSE)
- Solid line (black): M3D Dashed line (red): floor-fixed force plate
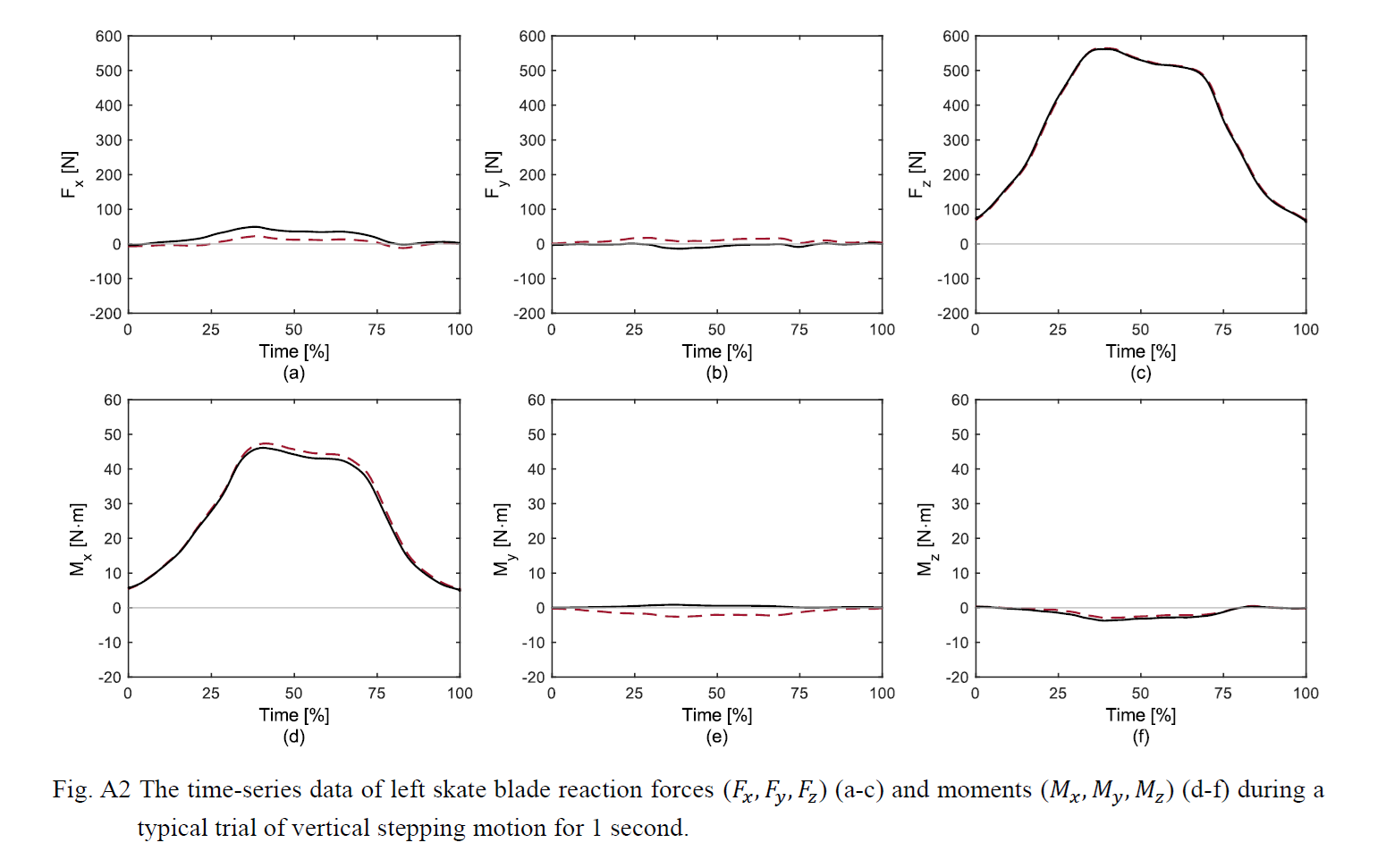 Vertical stepping motion (1 sec)
Vertical stepping motion (1 sec)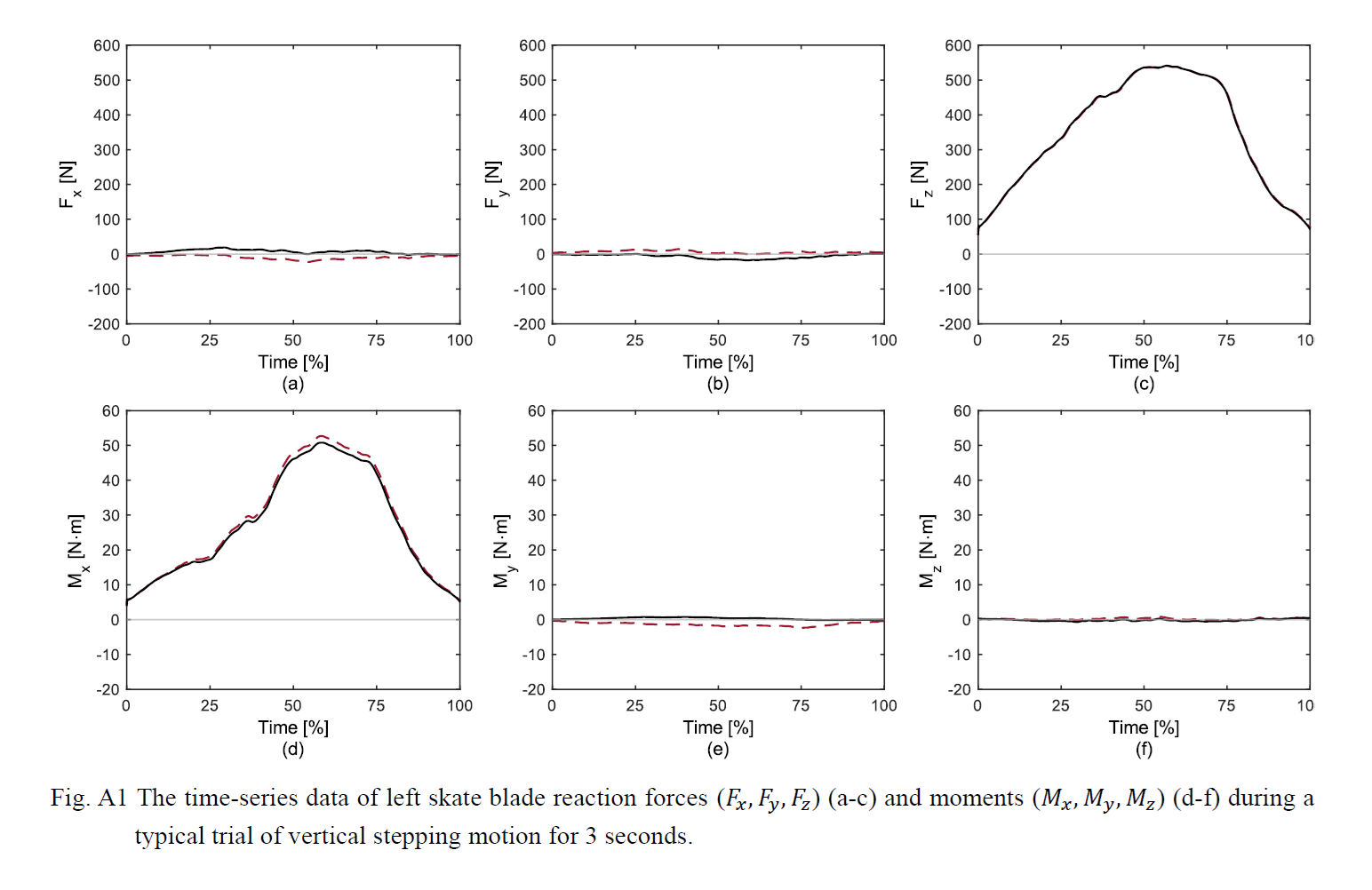 Vertical stepping motion (3 sec)
Vertical stepping motion (3 sec)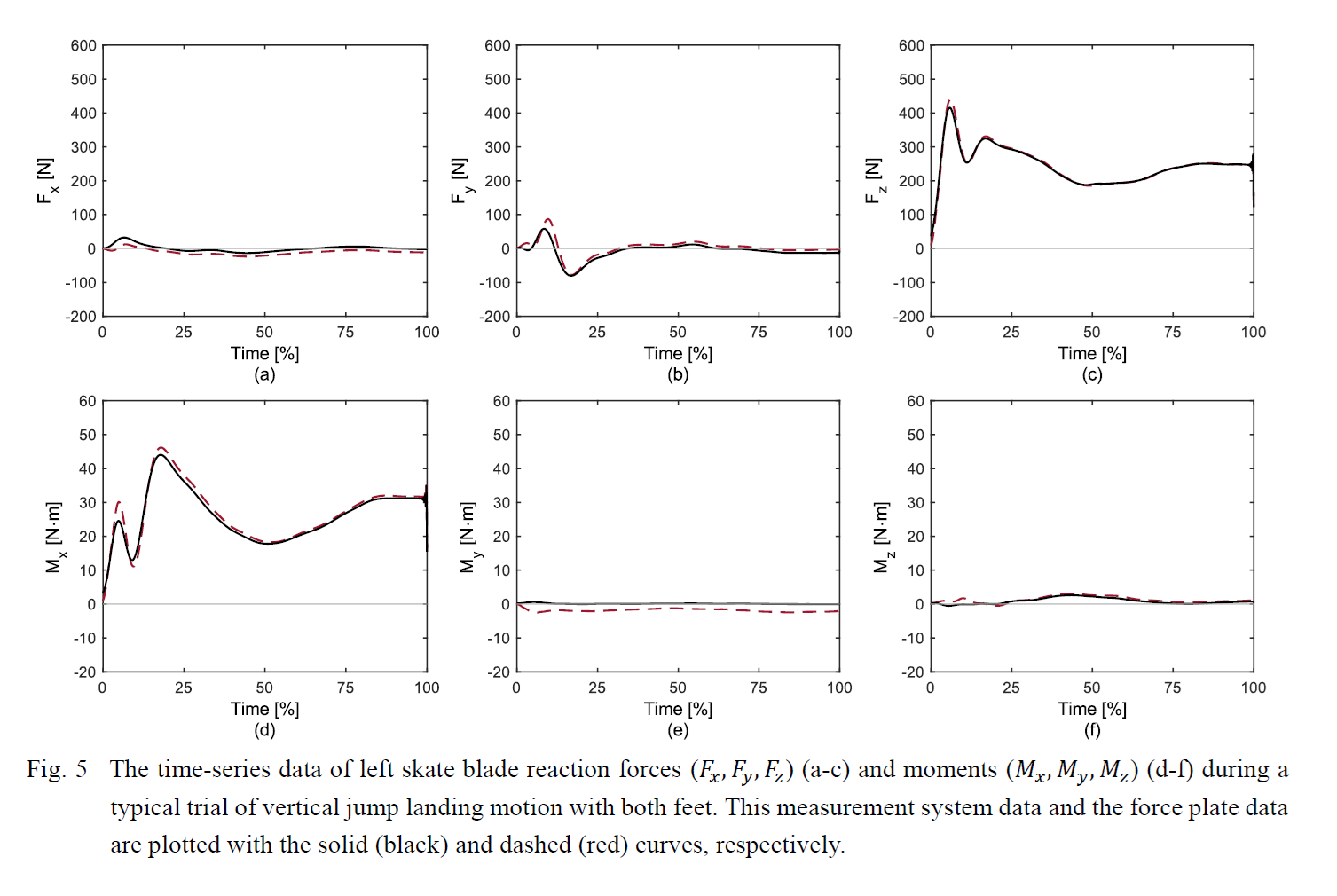 Vertical jump in place with both feet
Vertical jump in place with both feet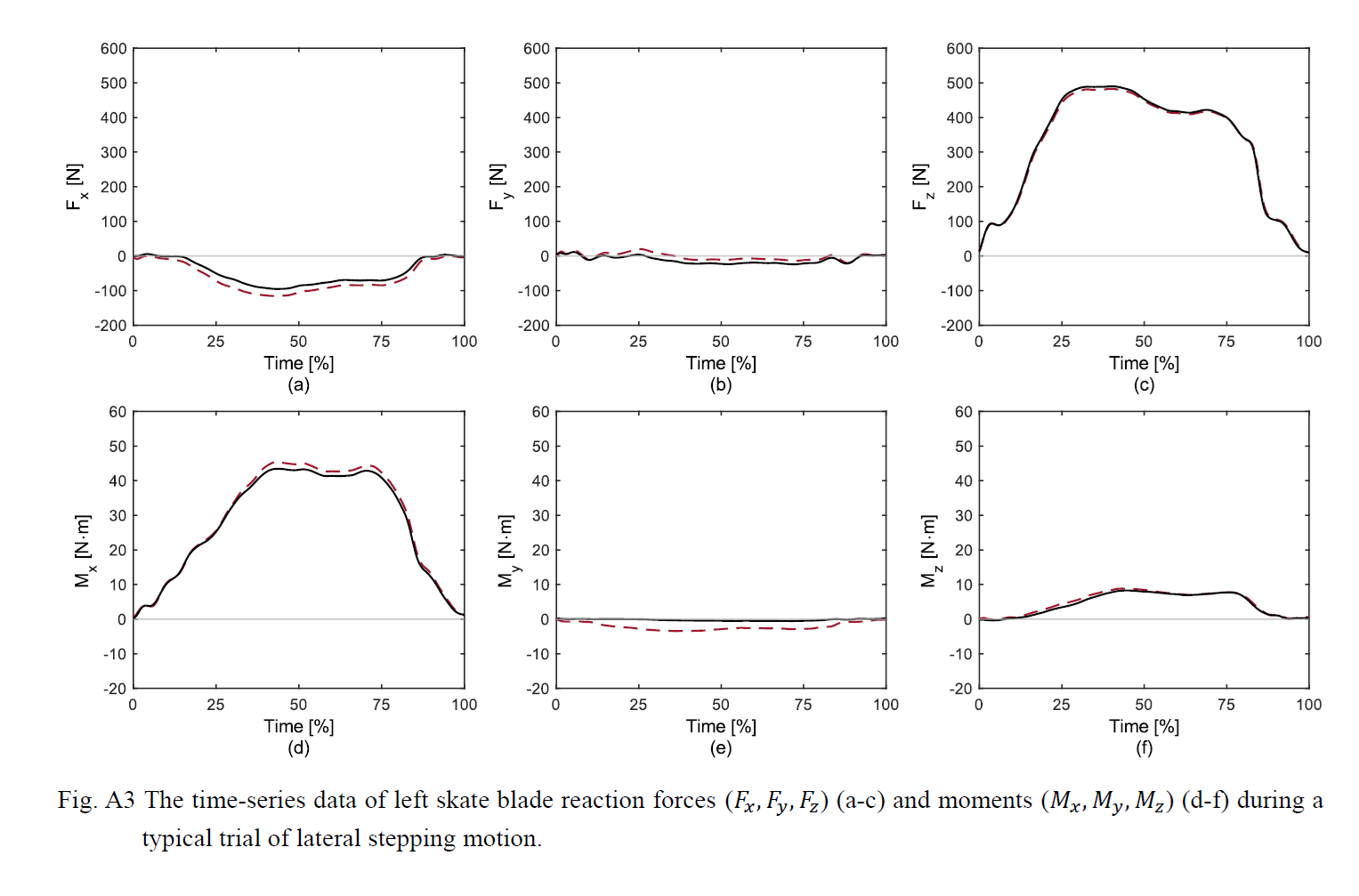 Lateral stepping motion
Lateral stepping motion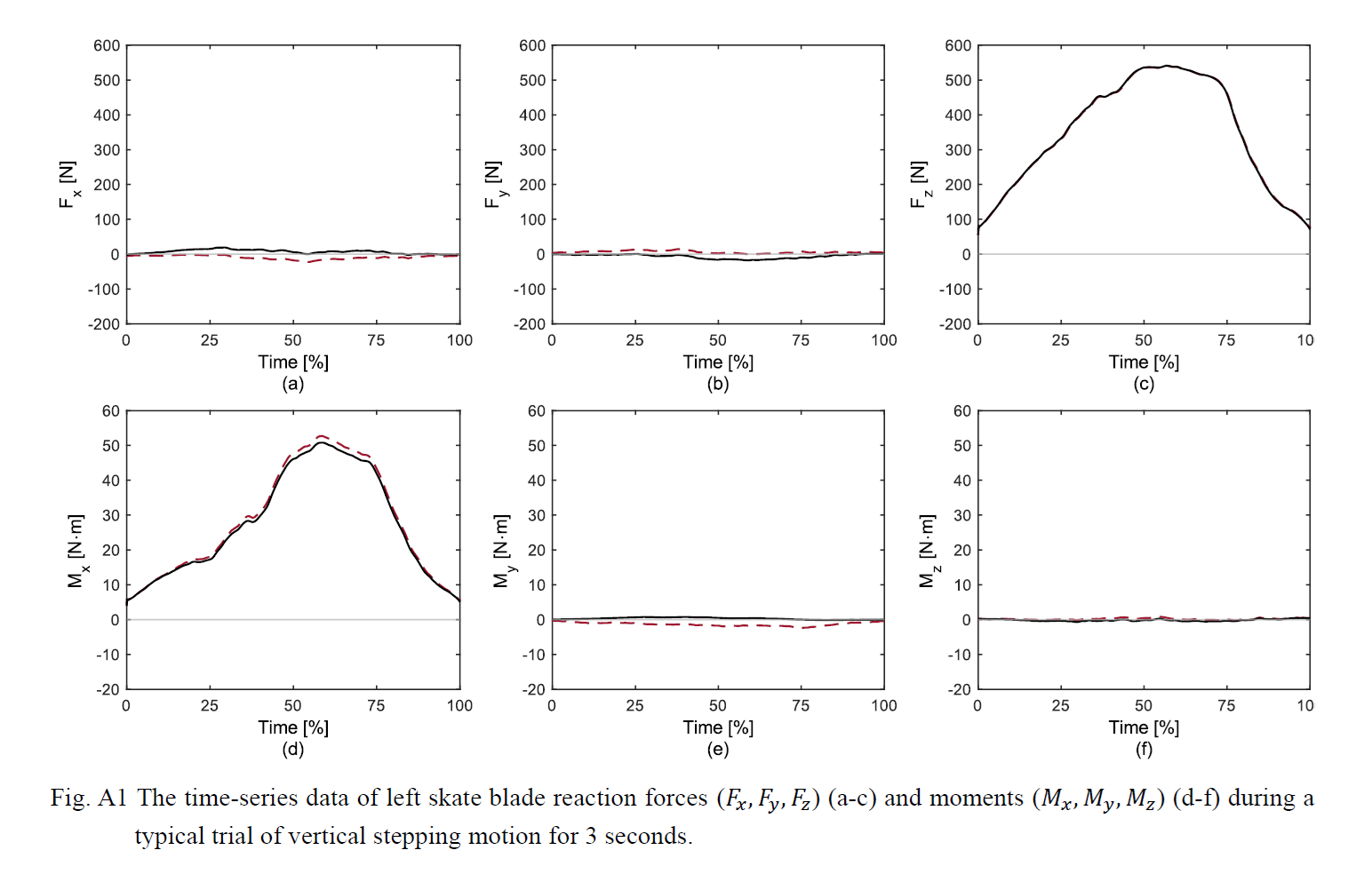 Longitudinal stepping motion
Longitudinal stepping motion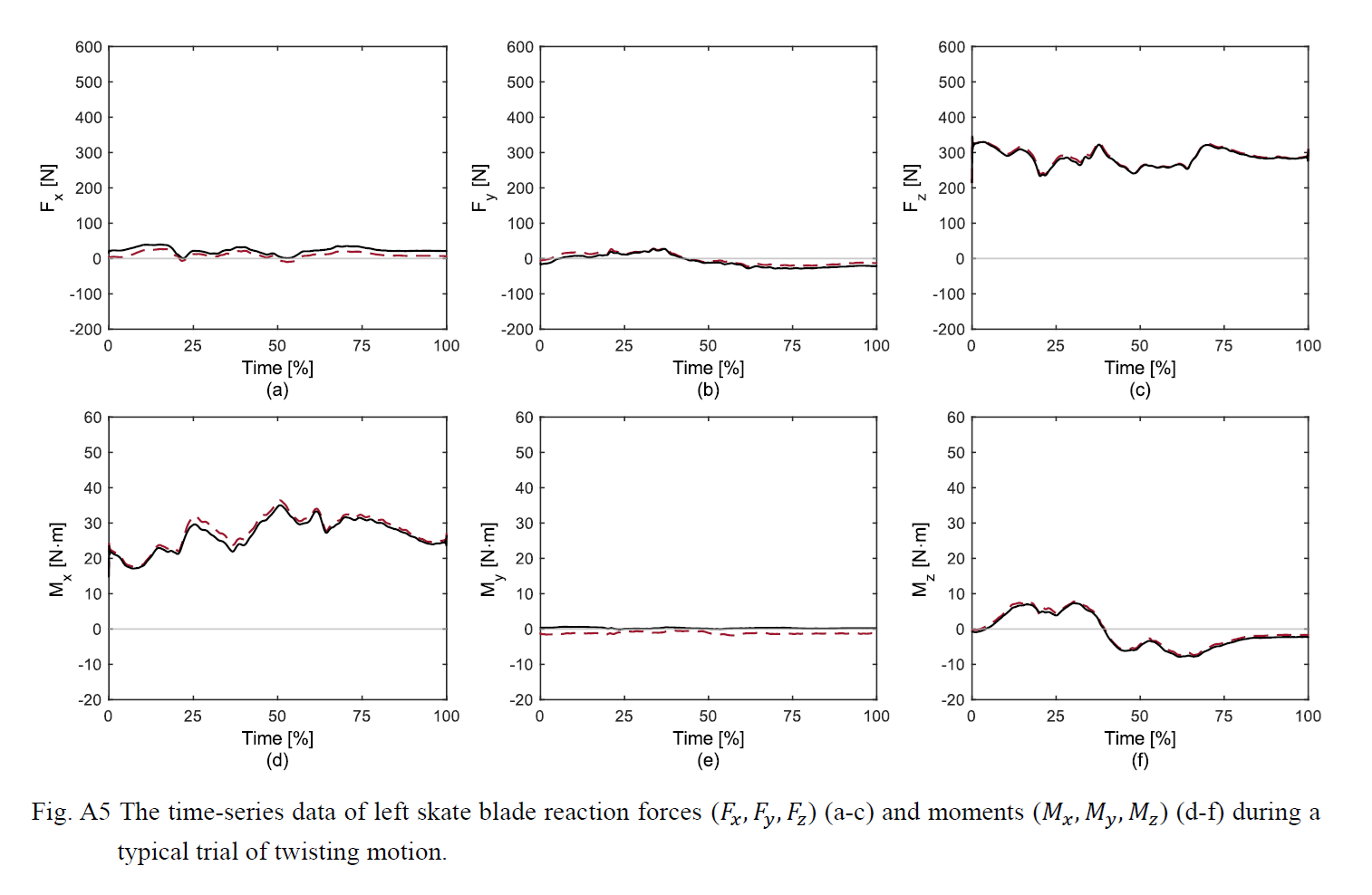 Twisting motion
Twisting motion
In this study, forward skating motion was measured, starting from a stationary standing position and accelerating, followed by six strokes on one foot.
In addition, for the half-rotation jump (waltz jump), the motion started from a stationary standing position, followed by an approach and takeoff with the left foot.
For each case, reaction forces were measured, and for the jump, measurements were taken up to the COP synthesized from the three M3D units.
*Reaction force... dashed line (red): Fx dashed line (blue): Fy solid line (black): Fz
*Moment... dashed line (red): Mx dashed line (blue): My solid line (black): Mz
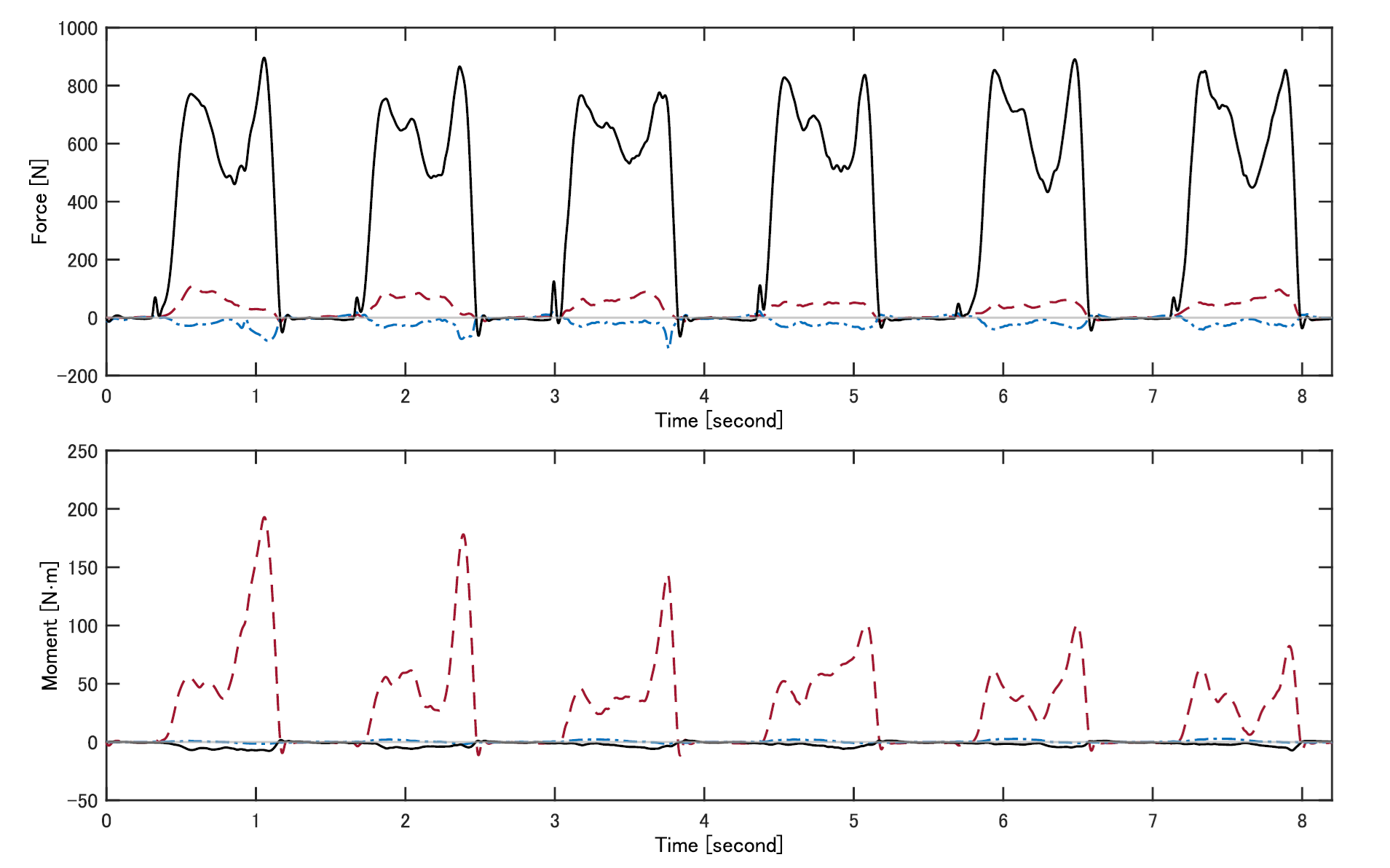 Typical reaction forces Fx, Fy, Fz (top) and moments Mx, My, Mz (bottom) of the left blade during forward skating on ice
Typical reaction forces Fx, Fy, Fz (top) and moments Mx, My, Mz (bottom) of the left blade during forward skating on ice Forward skating
Forward skating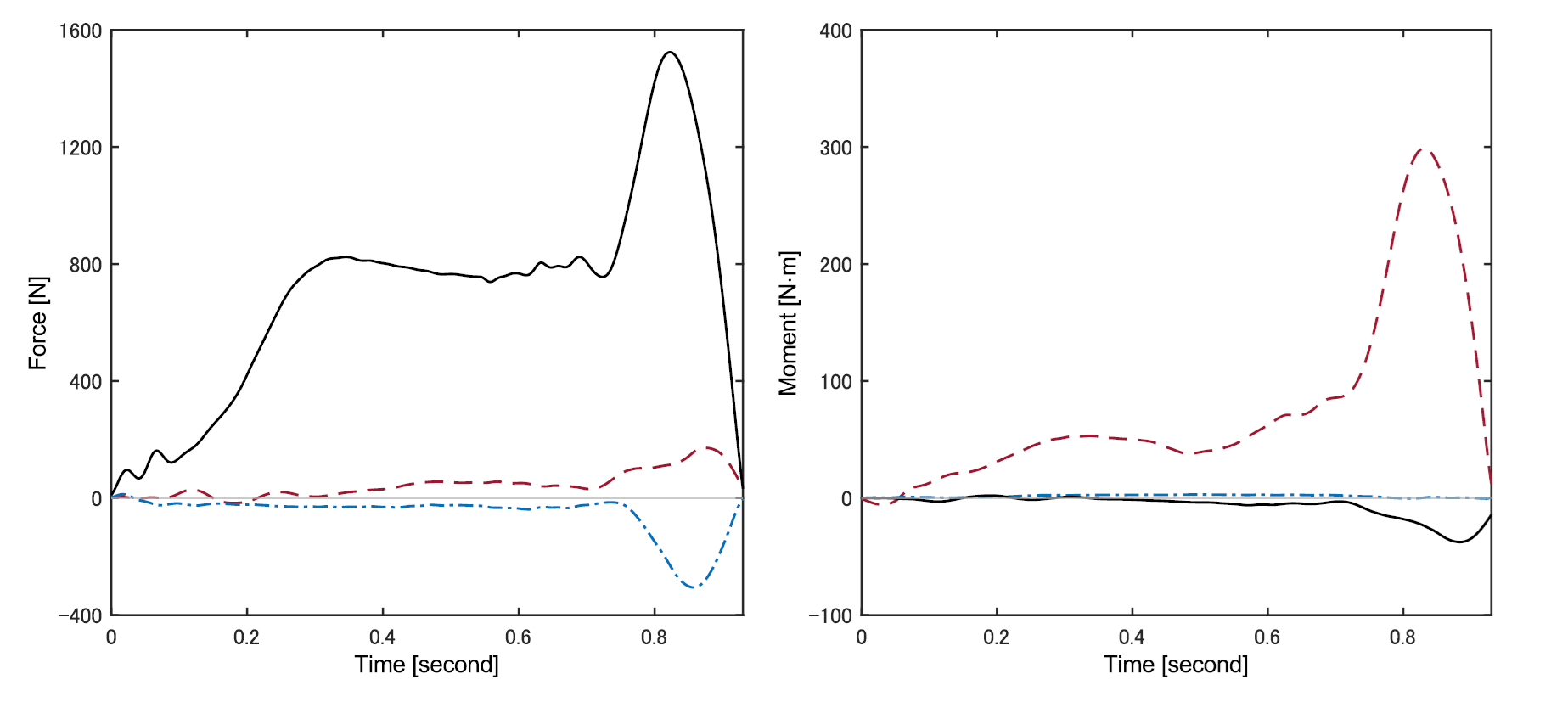 Typical reaction forces Fx, Fy, Fz (left) and moments Mx, My, Mz (right) of the left blade during half-rotation jump (takeoff) on ice
Typical reaction forces Fx, Fy, Fz (left) and moments Mx, My, Mz (right) of the left blade during half-rotation jump (takeoff) on ice Before half-rotation jump
Before half-rotation jump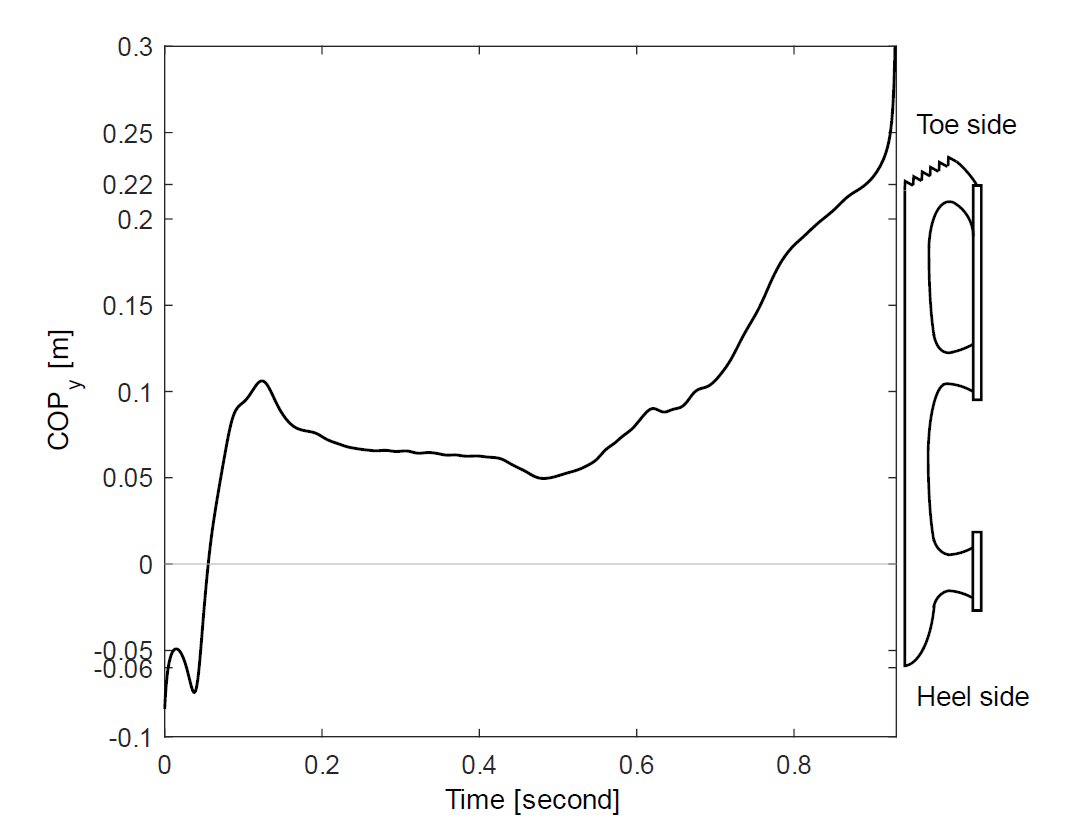 COPy of the left blade during half-rotation jump (takeoff) on ice
COPy of the left blade during half-rotation jump (takeoff) on ice
In the validation, the sensor (M3D) posture and position obtained by optical motion capture were transformed into a global coordinate system. However, performing optical motion capture on ice requires a large-scale setup. By capturing sensor posture, position, and athlete movement using IMU sensors, the skater can be treated as a coordinate system fixed relative to the ice, increasing expectations for applications in performance improvement and injury risk analysis from a new mechanical perspective.
■ Academic paper reference
Yuse HARA, Takayoshi TAKAHASHI, Naoto HARAGUCHI, Tatsuki KOSHIO, Yohsuke TAKEUCHI, Kazunori HASE, Wearable system for measuring three-dimensional reaction forces and moments using six-axis force sensors during skating, Journal of Biomechanical Science and Engineering, 2024, Volume 19, Issue 4, Pages 24-00093
DOI: 10.1299/jbse.24-00093
About M3D
This is an ultra-compact, thin wearable force plate available in various types, including wired, wired (analog output compatible), and wireless versions. This compact force plate is extremely rare in size worldwide and is a key product that can overcome previously difficult measurement challenges.
As a wearable device, it is highly compatible with motion measurement. It has been used for gait measurement without location constraints, pedal force measurement in road biking, and since it also includes a 9-axis IMU sensor, it is widely applied in robotics (e.g., placement on humanoid robot soles) and integration into industrial machinery.