
高感度3軸力覚センサ USLG10
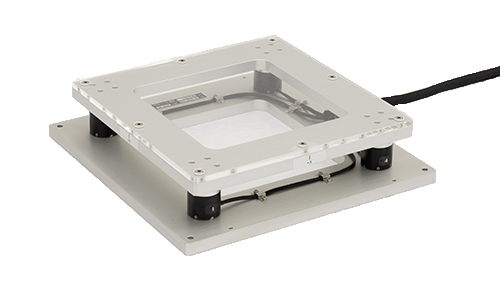
ロボットハンド、グリッパー先端に配置し、荷重入力点に近い位置で直接センシング
直径Φ14mmの細い形状をした超高感度3軸力覚センサです。ロボットハンドやグリッパー先端に配置し、直接ものを掴むときの荷重を計測。把持力だけでなく、摩擦係数の算出にも活躍できます。
仕様

| 品名 | 低容量型3軸力覚センサ USLG10 | |
|---|---|---|
| 型式 | USLG10-5N | USLG10-10N |
| 定格容量 | ||
| Fx, Fy | ±5N | ±50N |
| Fz | +5N | +10N |
| 定格出力 | ||
| Fx, Fy | 0.35mV/V程度(700με) | 0.70mV/V程度(1400με) |
| Fz | +0.10mV/V(200με) | +0.20mV/V(400με) |
| 許容過負荷 | 200% | |
| 非直線性 | ±1.0%RO以内(干渉補正後) | |
| ヒステリシス | ±1.0%RO以内(干渉補正後) | |
| 干渉度 | ±2.0%RO以下(干渉補正後) | |
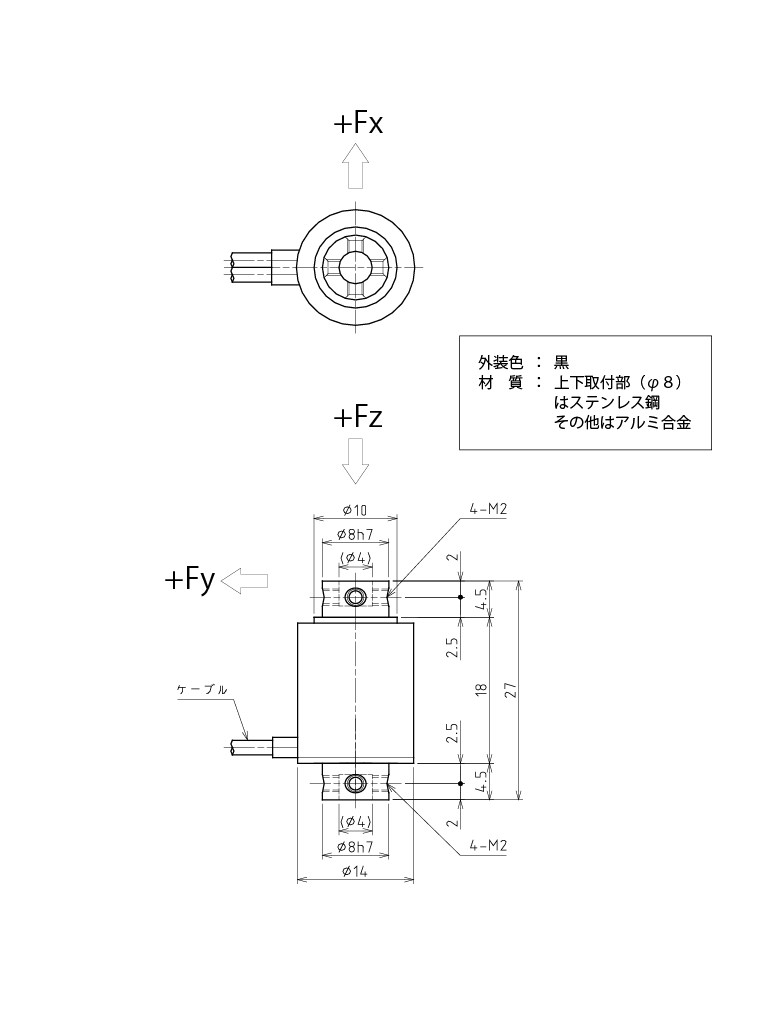
| 外形寸法 | φ14 × H27mm | |
| 質量 | 10g(ケーブル含まず) | |
| 推奨締付トルク | 受感部:10 N・cm ベース:40 N・cm | |
| 温度補償範囲 | 10~60℃(ただし、結露なきこと) | |
| 許容温度範囲 | 0~70℃(ただし、結露なきこと) | |
| 零点の温度影響 | Fx, Fy±0.06%RO/℃以内 Fz±0.2%RO/℃以内 | Fx, Fy±0.03%RO/℃以内 Fz±0.1%RO/℃以内 |
| 印加電圧 | 推奨:1~3V DC 許容:6V DC | |
| 入力抵抗 | 49~52Ω以内(BV共通) | |
| 出力抵抗 | Fx, Fy:116~124Ω以内 Fz:234~246Ω以内 | |
| 初期不平衡 | ±1.5mV/V以内(±3000με以内) | |
| 絶縁抵抗 | 1000MΩ/DC50V 以上 | |
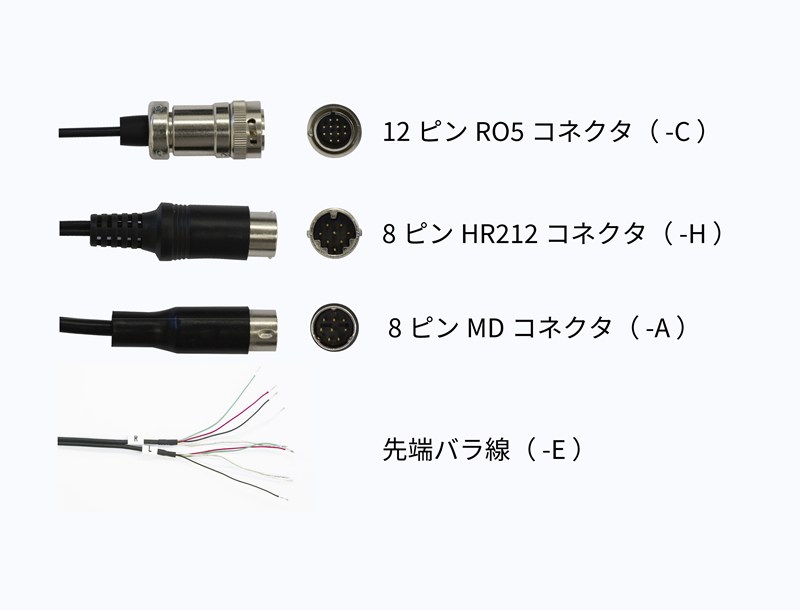
| ケーブル | 外径1.8mm、4芯シールドビニルケーブル2平行(計8芯) 2m、先端コネクタ付 | |
| 付属品 | 検査成績書、保証書、取扱説明書 各1部 | |
外観と成分方向
クリックするとPDFがひらきます




{kind=link}