
USL06-H5-0.2/0.9NM Torque Sensor
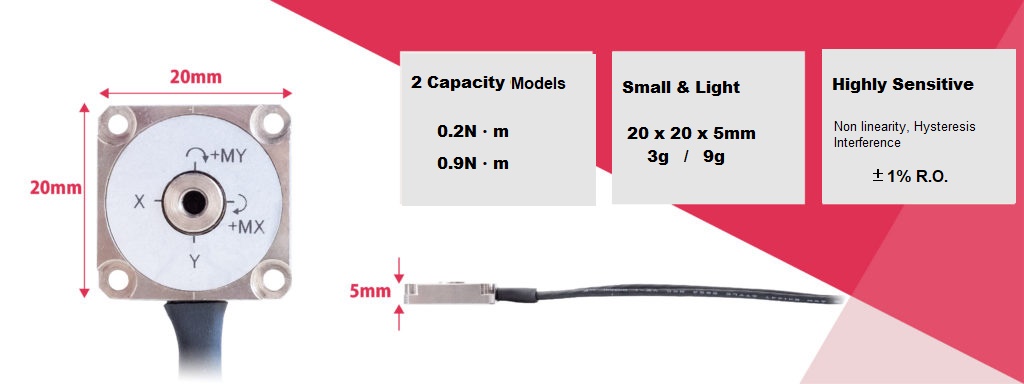
2 Low Capacity Models
The 0.2Nm and 0.9Nm models can be adopted according to your needs.
Small & Light
Our USL06-H5 sensors are small and lightweight force sensors
that require the minimum amount of space in an experimental setup or a robot.
High Sensitivity
Multi-axis load cells cause multiaxial interferences and require an interference correction formula to correct them. Our force sensors are calibrated one by one at our factory, and the interference correction coefficients are provided for each individual sensor to ensure accurate measurement. Non-linearity, Hysteresis and Interferences are strictly tested to be within ±1% Rated Output (RO).
Applications
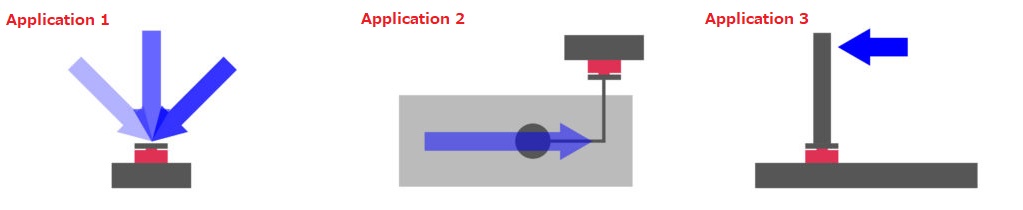
Application 1. Alignment for a prosthetic leg
Our 2-axis Force Sensor can be used to control the alignment of prosthesis parts
so that Mx and My moments are not applied when using a prosthetic leg.
Application 2. Resistance force measurement of liquid (water flow, wind column)
Measurement of moments that are applied to the support of a sample placed in the air or water.
It will show the differences in resistance forces depending on the shape of samples.
Application 3. Measurement of the point of an action at a distance
When a force is applied at a point away from the sensor,
the longer the distance is, the larger the moment that is generated.
The sensor can measure torque applied in the middle or the end of a shaft.
Specifications
| Model | USL06-H5-0.2NM/0.9NM |
|---|---|
| Allowable overload | 150% |
| Non-linearity | ±1% RO (after correction) |
| Hysteresis | ±1% RO (after correction) |
| Interference | ±1% RO (after correction) |
| Guaranteed temperature range | 10~60℃ (no condensation) |
| Allowable temperature range | -10~70℃ (no condensation) |
| Temperature shift zero | ±0.05%RO/℃ or less |
| Recommended range of applied voltage | 1~3V DC |
| Allowable applied voltage | 5V DC |
| Input resistance | 61~63 Ω |
| Output resistance | 122~126 Ω |
| Initial disproportion | ±1mv/V (±2000µε or less) |
| Insulation resistance | 1000MΩ/50V DC or more |
| Cable | Length: 2m External diameter:1.8mm 4-core shielded cable |
| External dimensions & weight |
USL06-H5-0.2NM:W20xD20xH5mm, 3g(excl. cable) |
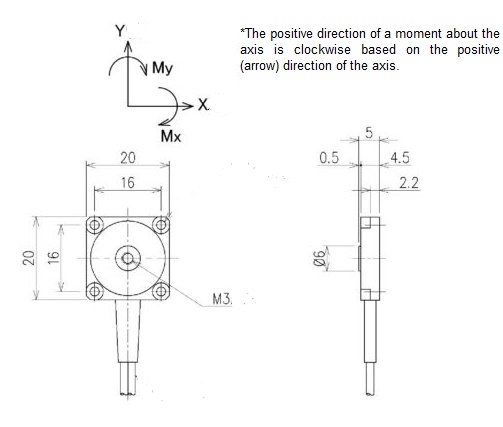
●Precautions
Make sure to use a screw that protrudes 4 mm or less below the pressure receiver surface (Φ6).
Using a screw deeper than 4.5 mm will damage the sensor.
Tighten a M3 screw carefully with the recommended torque not to become loose.
Be careful not to overtighten it since screwing generates rotational moment.
Recommended tightening torque
USL06-H5-0.2NM : 40N・cm or less
USL06-H5-0.9NM : 70N・cm or less
Fz, Mz Allowable overload
USL06-H5-0.2NM
Fz:100N Mz:0.3Nm
USL06-H5-0.9NM
Fz:500N Mz:0.7Nm