
Force Sensor (3-axis)
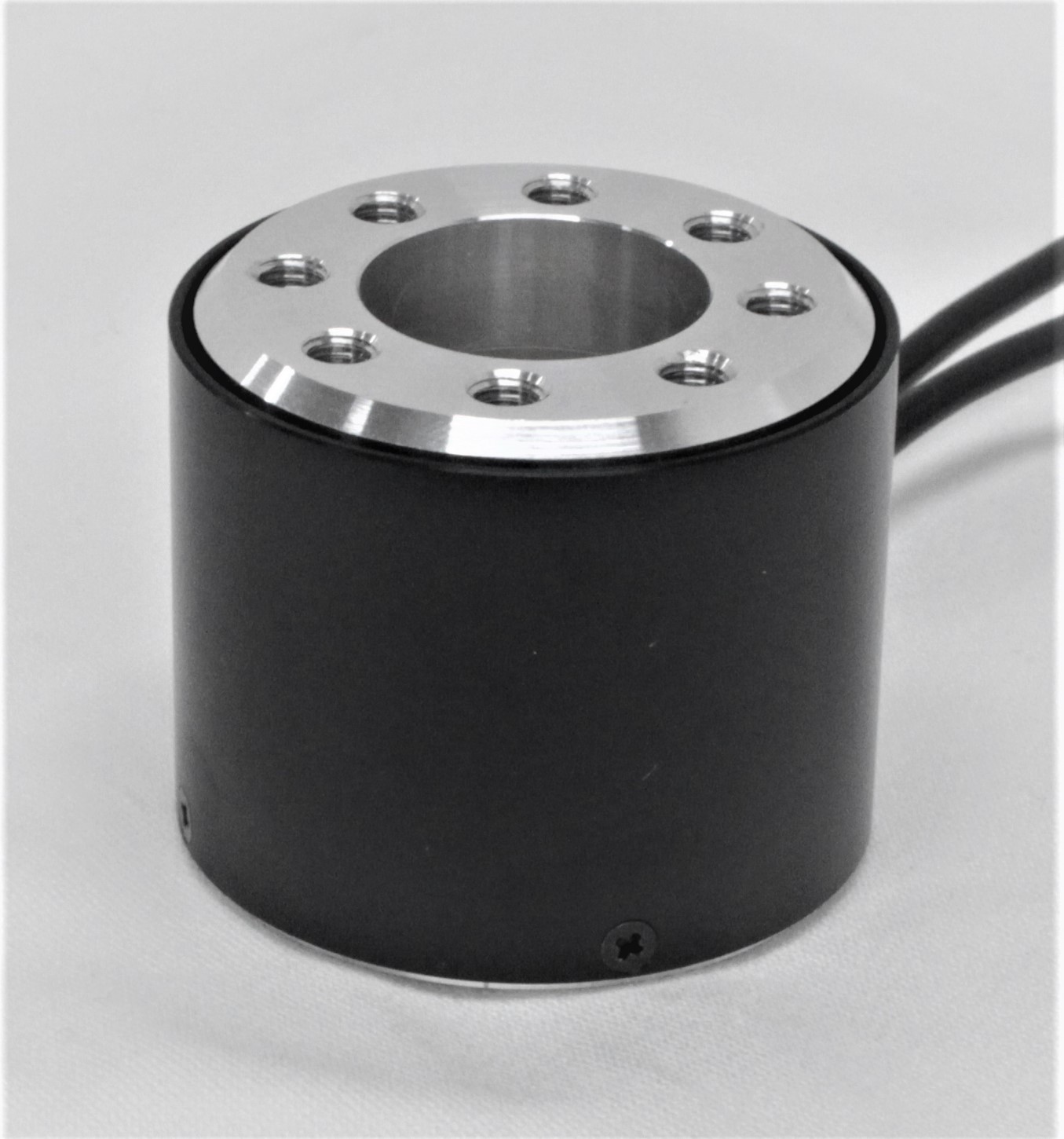
The TL6F04-5KN is a highly versatile compact 6-component force transducer for high load applications, which is capable of measuring translational forces F, Fy, and Fz and rotational moments Mx, My, and Mz.

One of the world’s smallest triaxial force sensors with high accuracy, which is very suitable for the development of robots and sports or welfare equipment.

Larger capacity triaxial load cell. Two models are available for Fz, +1KN and +2KN. Used for the development of robots and sports or welfare equipment. Although the size is slightly larger, it allows safer measurement when there is a possibility of larger load.

Amplifier integrated triaxial load cell. Used for force measurement inside robots or manufacturing machines where an amplifier is difficult to use.

High sensitivity triaxial load cell. Often used for texture and tactile measurement. Can detect subtle load such as the contact of a feather with a minimum level of noise.

Used for a robot’s fingertip or force feedback control. This extremely small sensor with an outer diameter of Φ14mm and high sensitivity (up to 10N) is ideal for measuring triaxial stress applied to the fingertip such as testing gripping force by inserting the sensor in a prosthetic hand.

Multi-purpose triaxial load cell. Larger allowable moment and larger distance can be applied between the force point and the action point compared with other 3-axis sensors. Often used in places where moments are expected to be applied, such as handrails and robot frames.

Higher sensitivity model (Fz: + 500N) than the TL3B04. Larger allowable moment and larger distance between the force point and the action point compared with other 3-axis sensors.